
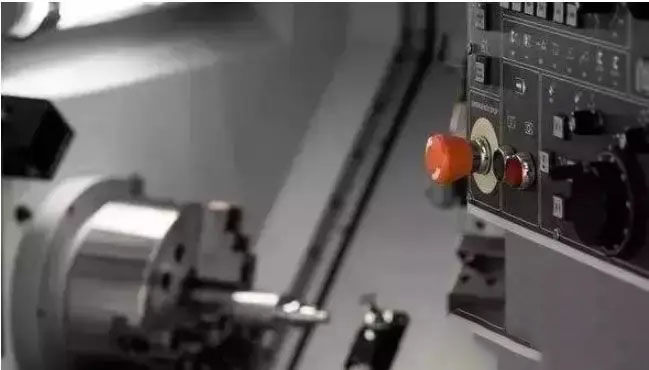
सीएनसी मेशिन उपकरण उपकरणको दक्षता यसको शुद्धतासँग नजिकको छ, यसले त्यस्ता उपकरणहरू खरिद वा विकास गर्दा कम्पनीहरूको लागि प्रमुख प्राथमिकता बनाउँछ। यद्यपि, धेरैजसो नयाँ मेसिन उपकरणहरूको शुद्धता कारखाना छोड्दा आवश्यक मापदण्डहरू भन्दा कम हुन्छ। थप रूपमा, लामो समयसम्म प्रयोगको क्रममा मेकानिकल रन-इन र पहिरनको घटनाले इष्टतम उत्पादन प्रदर्शन सुनिश्चित गर्न सीएनसी मेसिन उपकरणहरूको शुद्धता समायोजन गर्न महत्त्वपूर्ण आवश्यकतालाई जोड दिन्छ।
1. प्रतिक्रिया क्षतिपूर्ति
सीएनसी मेशिन उपकरणहरू भित्र ब्याकल्याशलाई कम गर्दै, प्रत्येक समन्वय अक्षको फिड ट्रान्समिशन चेनमा ड्राइभिङ कम्पोनेन्टहरूको रिभर्स डेड जोनबाट उत्पन्न हुने त्रुटिहरू र प्रत्येक मेकानिकल गति प्रसारण जोडीको रिभर्स क्लियरेन्सले विचलनहरू निम्त्याउँछ किनकि प्रत्येक समन्वय अक्ष अगाडिबाट रिभर्स गतिमा ट्रान्जिसन हुन्छ। यो विचलन, रिभर्स क्लियरेन्स वा हराएको गतिको रूपमा पनि चिनिन्छ, अर्ध-बंद-लूप सर्वो प्रणालीहरू प्रयोग गर्दा मेसिन उपकरणको स्थिति सटीकता र दोहोरिने स्थिति सटीकतालाई महत्त्वपूर्ण रूपमा असर गर्न सक्छ। यसबाहेक, समयसँगै पहिरनका कारण किनेमेटिक जोडी क्लियरेन्समा क्रमिक वृद्धिले उल्टो विचलनमा समान वृद्धि निम्त्याउँछ। त्यसकारण, मेसिन उपकरणको प्रत्येक समन्वय अक्षको उल्टो विचलनको लागि नियमित मापन र क्षतिपूर्ति अनिवार्य छ।

प्रतिक्रिया मापन
उल्टो विचलन मूल्याङ्कन गर्न, समन्वय अक्षको यात्रा दायरा भित्र सुरु गर्नुहोस्। पहिले, अगाडि वा उल्टो दिशामा एक सेट दूरी सार्दै सन्दर्भ बिन्दु स्थापना गर्नुहोस्। यसलाई पछ्याउँदै, एक निश्चित दूरी कभर गर्न एउटै दिशामा एक विशिष्ट आन्दोलन आदेश जारी गर्नुहोस्। अर्को, विपरित दिशामा समान दूरी सार्न अगाडि बढ्नुहोस् र सन्दर्भ र स्टप स्थितिहरू बीचको भिन्नता निर्धारण गर्नुहोस्। सामान्यतया, धेरै मापनहरू (प्रायः सात) मध्यबिन्दु र यात्रा दायराको दुवै चरम सीमाहरू नजिकका तीन स्थानहरूमा सञ्चालन गरिन्छ। औसत मान त्यसपछि प्रत्येक स्थानमा गणना गरिन्छ, यी औसतहरू बीचको अधिकतमलाई उल्टो विचलनको मापनको रूपमा प्रयोग गरिन्छ। उल्टो विचलन मूल्य सही रूपमा निर्धारण गर्न मापनको समयमा एक निश्चित दूरी सार्न आवश्यक छ।

रैखिक गति अक्षको उल्टो विचलनको मूल्याङ्कन गर्दा, मापन उपकरणको रूपमा डायल सूचक वा डायल गेज प्रयोग गर्न सामान्य छ। यदि परिस्थितिले अनुमति दिन्छ भने, एक दोहोरो-फ्रिक्वेन्सी लेजर इन्टरफेरोमिटर पनि यस उद्देश्यको लागि प्रयोग गर्न सकिन्छ। मापनको लागि डायल सूचक प्रयोग गर्दा, यो सुनिश्चित गर्न आवश्यक छ कि मिटर आधार र स्टेम अत्यधिक विस्तार नगर्नुहोस्, किनकि मापनको क्रममा लामो क्यान्टिलभरले बलको कारणले मिटर आधारलाई सार्न सक्छ, जसले गलत रिडिङहरू र अवास्तविक क्षतिपूर्ति मानहरू निम्त्याउँछ।
मापनको लागि प्रोग्रामिङ विधि लागू गर्नाले प्रक्रियाको सुविधा र शुद्धता बढाउन सक्छ। उदाहरणका लागि, तीन-समन्वय ठाडो मेसिन उपकरणमा X-अक्षको उल्टो विचलनको मूल्याङ्कन गर्न, प्रक्रिया स्पिन्डलको बेलनाकार सतहमा मिटर थिचेर, मापनको लागि तोकिएको कार्यक्रम चलाएर सुरु गर्न सकिन्छ।
N10G91G01X50F1000; कार्यक्षेत्रलाई दायाँतिर सार्नुहोस्
N20X-50;कार्यतालिका प्रसारण अन्तर हटाउन बायाँ तिर सर्छ
N30G04X5; अवलोकनको लागि रोक्नुहोस्
N40Z50; Z-अक्ष उठेको र बाटो बाहिर
N50X-50: वर्कबेन्च बायाँतिर सर्छ
N60X50: Workbench दायाँ सर्छ र रिसेट गर्छ
N70Z-50: Z अक्ष रिसेट
N80G04X5: अवलोकनका लागि रोक्नुहोस्
N90M99;
यो नोट गर्न महत्त्वपूर्ण छ कि मापन परिणामहरू कार्यक्षेत्रको विभिन्न अपरेटिङ गतिहरूमा आधारित फरक हुन सक्छ। सामान्यतया, कम गतिमा मापन गरिएको मान उच्च गतिमा भन्दा ठूलो हुन्छ, विशेष गरी जब मेसिन उपकरण अक्ष लोड र गति प्रतिरोध पर्याप्त हुन्छ। कम गतिमा, कार्यतालिका ढिलो गतिमा चल्छ, जसको परिणामस्वरूप ओभरशूट र ओभरट्राभलको कम सम्भावना हुन्छ, त्यसैले उच्च मापन गरिएको मूल्य प्राप्त हुन्छ। अर्कोतर्फ, उच्च गतिमा, ओभरशूट र ओभरट्राभल छिटो कार्यतालिका गतिको कारण हुने सम्भावना बढी हुन्छ, परिणामस्वरूप सानो मापन मान हुन्छ। रोटरी गति अक्षको उल्टो विचलनको लागि मापन दृष्टिकोणले रैखिक अक्षको जस्तै समान प्रक्रियालाई पछ्याउँछ, पत्ता लगाउनको लागि प्रयोग गरिने उपकरण मात्र फरक छ।

Backlash को लागि क्षतिपूर्ति
देशमा बनाइएका धेरै सीएनसी मेसिन उपकरणहरूले ०.०२ मिमी भन्दा बढीको स्थिति सटीकता प्रदर्शन गर्दछ, तर क्षतिपूर्तिको लागि क्षमताको अभाव छ। केहि परिस्थितिहरूमा, प्रोग्रामिङ प्रविधिहरू एक-तर्फी स्थिति पूरा गर्न र त्यस्ता मेसिन उपकरणहरूको लागि ब्याकल्याश हटाउन प्रयोग गर्न सकिन्छ। जबसम्म मेकानिकल कम्पोनेन्ट अपरिवर्तित रहन्छ, कम-गति, एकतर्फी स्थिति प्रक्षेपणको लागि सुरूवात बिन्दुमा पुगेपछि इन्टरपोलेसन प्रशोधन प्रारम्भ गर्न सम्भव हुन्छ। इन्टरपोलेसन फिडको समयमा उल्टो दिशाको सामना गर्दा, रिभर्स क्लियरेन्स मूल्यलाई औपचारिक रूपमा इन्टरपोलेसन गर्दा इन्टरपोलेसन प्रशोधनको शुद्धता बढाउने र प्रभावकारी रूपमा पूरा गर्ने क्षमता हुन्छ।सीएनसी मिल्ड भागसहिष्णुता आवश्यकताहरू।
सीएनसी मेसिन उपकरणका अन्य प्रकारका लागि, सीएनसी उपकरणमा बहु मेमोरी ठेगानाहरू सामान्यतया प्रत्येक अक्षको ब्याकल्याश मान भण्डारण गर्न नामित गरिन्छ। जब मेशिन उपकरणको अक्षलाई यसको आन्दोलनको दिशा परिवर्तन गर्न निर्देशित गरिन्छ, CNC उपकरणले स्वचालित रूपमा अक्षको ब्याकल्याश मान पुन: प्राप्त गर्नेछ, जसले समन्वय विस्थापन आदेश मूल्यलाई क्षतिपूर्ति र सुधार गर्दछ। यसले मेसिन उपकरणलाई कमाण्ड पोजिसनमा ठ्याक्कै राख्न सकिन्छ र मेसिन उपकरणको शुद्धतामा रिभर्स विचलनको प्रतिकूल प्रभावलाई कम गर्छ भन्ने कुरा सुनिश्चित गर्दछ।
सामान्यतया, CNC प्रणालीहरू एकल उपलब्ध ब्याकल्याश क्षतिपूर्ति मूल्यसँग सुसज्जित छन्। उच्च र कम-गति गति परिशुद्धता सन्तुलन, साथै मेकानिकल सुधारलाई सम्बोधन गर्न, चुनौतीपूर्ण हुन्छ। यसबाहेक, द्रुत गतिको समयमा मापन गरिएको उल्टो विचलन मान मात्र इनपुट क्षतिपूर्ति मूल्यको रूपमा प्रयोग गर्न सकिन्छ। फलस्वरूप, काट्ने क्रममा द्रुत स्थिति सटीकता र इन्टरपोलेसन सटीकता बीच सन्तुलन हासिल गर्न गाह्रो हुन सक्छ।

FANUC0i र FANUC18i जस्ता CNC प्रणालीहरूको लागि, द्रुत गति (G00) र स्लो-स्पीड कटिङ फिड मोशन (G01) को लागि ब्याकल्याश क्षतिपूर्तिको दुई उपलब्ध रूपहरू छन्। छनौट गरिएको खुवाउने विधिमा निर्भर गर्दै, सीएनसी प्रणालीले स्वचालित रूपमा सुधारिएको प्रशोधन सटीकता प्राप्त गर्न फरक क्षतिपूर्ति मानहरू चयन गर्दछ र प्रयोग गर्दछ।
G01 कटिङ फिड गतिबाट प्राप्त गरिएको ब्याकल्याश मान A, प्यारामिटर NO11851 मा प्रविष्ट गरिनु पर्छ (G01 ट्रायल गति सामान्यतया प्रयोग हुने काट्ने फिड गति र मेसिन उपकरण विशेषताहरूको आधारमा निर्धारण गरिनुपर्छ), जबकि G00 बाट ब्याकल्याश मान B इनपुट गर्नुपर्छ। प्यारामिटर NO11852 मा। यो नोट गर्न महत्त्वपूर्ण छ कि यदि CNC प्रणालीले छुट्टै निर्दिष्ट रिभर्स ब्याकल्याश क्षतिपूर्ति कार्यान्वयन गर्न खोज्छ भने, प्यारामिटर नम्बर 1800 को चौथो अंक (RBK) लाई 1 मा सेट गर्नुपर्छ; अन्यथा, छुट्टै तोकिएको उल्टो प्रतिक्रिया क्षतिपूर्ति गरिने छैन। ग्याप क्षतिपूर्ति। G02, G03, JOG, र G01 सबैले समान क्षतिपूर्ति मान प्रयोग गर्छन्।

पिच त्रुटिहरूको लागि क्षतिपूर्ति
सीएनसी मेसिन उपकरणहरूको सटीक स्थितिमा मेसिन उपकरणको चल घटकहरू सीएनसी प्रणालीको आदेश अन्तर्गत पुग्न सक्ने सटीकताको मूल्याङ्कन समावेश गर्दछ। यो परिशुद्धताले CNC मेसिन टुलहरूलाई परम्परागत उपकरणहरूबाट छुट्याउन महत्त्वपूर्ण भूमिका खेल्छ। मेशिन उपकरणको ज्यामितीय परिशुद्धतासँग पङ्क्तिबद्ध, यसले काट्ने परिशुद्धतालाई विशेष रूपमा प्वाल मेसिनिङमा प्रभाव पार्छ। प्वाल ड्रिलिंगमा पिच त्रुटिले पर्याप्त प्रभाव पार्छ। यसको प्रशोधन सटीकताको मूल्याङ्कन गर्न सीएनसी मेसिन उपकरणको क्षमता प्राप्त स्थिति सटीकतामा निर्भर गर्दछ। त्यसकारण, सीएनसी मेशिन उपकरणहरूको स्थिति सटीकताको पहिचान र सुधार प्रक्रिया गुणस्तर सुनिश्चित गर्न आवश्यक उपायहरू हुन्।
पिच मापन प्रक्रिया
हाल, मेशिन उपकरणहरूको मूल्याङ्कन र ह्यान्डलिङको लागि प्राथमिक विधि डुअल-फ्रिक्वेन्सी लेजर इन्टरफेरोमिटरहरूको प्रयोग हो। यी इन्टरफेरोमिटरहरूले लेजर इन्टरफेरोमेट्रीका सिद्धान्तहरूमा काम गर्छन् र मापनको सन्दर्भको रूपमा वास्तविक-समय लेजर तरंगदैर्ध्य प्रयोग गर्छन्, जसले गर्दा मापन सटीकता बढाउँछ र अनुप्रयोगहरूको दायरा विस्तार गर्दछ।
पिच पत्ता लगाउने प्रक्रिया निम्नानुसार छ:
- डुअल फ्रिक्वेन्सी लेजर इन्टरफेरोमिटर स्थापना गर्नुहोस्।
- मेसिन टुलको अक्षको छेउमा अप्टिकल नाप्ने यन्त्र राख्नुहोस् जसलाई मापन चाहिन्छ।
- लेजर हेडलाई पङ्क्तिबद्ध गर्नुहोस् कि मापन अक्ष या त मेसिन उपकरणको चाल अक्षसँग समानान्तर वा समरेखीय छ, यसरी अप्टिकल मार्गलाई पूर्व-पङ्क्तिबद्ध गर्नुहोस्।
- लेजरले यसको सञ्चालन तापक्रममा पुगेपछि मापन प्यारामिटरहरू इनपुट गर्नुहोस्।
- मेशिन उपकरण सारेर निर्धारित मापन प्रक्रियाहरू कार्यान्वयन गर्नुहोस्।
- डाटा प्रशोधन गर्नुहोस् र परिणामहरू उत्पन्न गर्नुहोस्।
पिच त्रुटि क्षतिपूर्ति र स्वचालित क्यालिब्रेसन
जब सीएनसी मेसिन उपकरणको मापन गरिएको स्थिति त्रुटिले स्वीकार्य दायरा पार गर्छ, त्यहाँ त्रुटि सच्याउन आवश्यक छ। एउटा प्रचलित दृष्टिकोणमा पिच त्रुटि क्षतिपूर्ति तालिका कम्प्युट गर्ने र स्थिति त्रुटि सुधार गर्न मेसिन उपकरणको CNC प्रणालीमा म्यानुअल रूपमा इनपुट गर्ने समावेश छ। यद्यपि, म्यानुअल क्षतिपूर्ति समय-उपभोग र त्रुटिहरूको खतरा हुन सक्छ, विशेष गरी जब CNC मेसिन उपकरणको तीन वा चार अक्षहरूमा असंख्य क्षतिपूर्ति बिन्दुहरूसँग व्यवहार गर्दा।
यस प्रक्रियालाई सुव्यवस्थित गर्न, एक समाधान विकसित गरिएको छ। RS232 इन्टरफेस मार्फत कम्प्युटर र मेसिन टुलको सीएनसी कन्ट्रोलरलाई लिंक गरेर र VB मा सिर्जना गरिएको स्वचालित क्यालिब्रेसन सफ्टवेयरको फाइदा उठाएर, लेजर इन्टरफेरोमिटर र CNC मेसिन टुललाई सिङ्क्रोनाइज गर्न सम्भव छ। यो सिंक्रोनाइजेसनले CNC मेसिन उपकरणको स्थिति सटीकताको स्वचालित पत्ता लगाउन र स्वचालित पिच त्रुटि क्षतिपूर्तिको कार्यान्वयन सक्षम गर्दछ। क्षतिपूर्ति विधि समावेश छ:
- CNC नियन्त्रण प्रणालीमा अवस्थित क्षतिपूर्ति प्यारामिटरहरूको जगेडा सिर्जना गर्दै।
- कम्प्युटरको प्रयोग गरेर पोइन्ट-बाइ-पोइन्ट पोजिसनिङ एक्युरेसी मापनको लागि मेसिन टूल CNC कार्यक्रम उत्पन्न गर्दै, जुन त्यसपछि CNC प्रणालीमा पठाइन्छ।
- प्रत्येक बिन्दुको स्थिति त्रुटि स्वचालित रूपमा मापन।
- पूर्वनिर्धारित क्षतिपूर्ति बिन्दुहरूमा आधारित क्षतिपूर्ति मापदण्डहरूको नयाँ सेट उत्पन्न गर्दै र स्वचालित पिच क्षतिपूर्तिको लागि CNC प्रणालीमा प्रसारण गर्दै।
- बारम्बार शुद्धता प्रमाणित गर्दै।
यी विशिष्ट समाधानहरूले सीएनसी मेसिन उपकरणहरूको शुद्धता बढाउने लक्ष्य राख्छन्। जे होस्, विभिन्न सीएनसी मेसिन उपकरणहरूको शुद्धता फरक हुन सक्छ भनेर ध्यान दिनु आवश्यक छ। नतिजाको रूपमा, मेशिन उपकरणहरू तिनीहरूको व्यक्तिगत परिस्थिति अनुसार क्यालिब्रेट हुनुपर्छ।
यदि त्रुटि क्षतिपूर्ति मेसिन उपकरणमा प्रदर्शन गरिएको छैन भने, यसले उत्पादन गरेको CNC भागहरूमा कस्तो प्रभाव पार्छ?
यदि त्रुटि क्षतिपूर्तिलाई मेशिन उपकरणमा बेवास्ता गरिएको छ भने, यसले विसंगतिहरू निम्त्याउन सक्छसीएनसी भागहरूनिर्मित। उदाहरणका लागि, यदि मेसिन उपकरणमा समायोजन नगरिएको स्थिति त्रुटि छ भने, उपकरण वा वर्कपीसको वास्तविक स्थिति CNC कार्यक्रममा निर्दिष्ट प्रोग्राम गरिएको स्थितिबाट भिन्न हुन सक्छ, जसले उत्पादन गरिएका भागहरूमा आयामी अशुद्धता र ज्यामितीय त्रुटिहरू निम्त्याउँछ।
उदाहरणका लागि, यदि सीएनसी मिलिङ मेसिनको एक्स-अक्षमा समायोजन नगरिएको स्थिति त्रुटि छ भने, मिल्ड स्लटहरू वा वर्कपीसमा प्वालहरू गलत रूपमा मिलाइएको वा गलत आयामहरू हुन सक्छ। त्यसै गरी, लेथ अपरेशनमा, समायोजन नगरिएको स्थिति त्रुटिहरूले घुमाइएको भागहरूको व्यास वा लम्बाइमा अशुद्धताहरू निम्त्याउन सक्छ। यी विसंगतिहरूले गैर-अनुरूप भागहरू निम्त्याउन सक्छ जुन असफल हुन्छ
एनेबोनले उत्कृष्ट र उत्कृष्ट बन्नको लागि प्रत्येक कडा परिश्रम गर्नेछ, र OEM, कस्टमको लागि चीन गोल्ड आपूर्तिकर्ताको लागि अन्तरमहाद्वीपीय शीर्ष-ग्रेड र उच्च-टेक उद्यमहरूको श्रेणीबाट खडा हुनका लागि हाम्रा उपायहरूलाई गति दिनेछ।सीएनसी मेसिनिंग सेवा, शीट मेटल निर्माण सेवा, मिलिङ सेवाहरू। Anebon ले तपाइँको आफ्नै सन्तोषजनक भेट्न तपाइँको व्यक्तिगत खरिद गर्नेछ! Anebon को व्यवसायले उत्पादन विभाग, राजस्व विभाग, उत्कृष्ट नियन्त्रण विभाग र सेवा केन्द्र, आदि सहित धेरै विभागहरू सेट अप गर्दछ।
कारखाना आपूर्ति चीनसटीक भाग र एल्युमिनियम भाग, तपाईले Anebon लाई बजारमा धेरै समान भागहरू रोक्नको लागि आफ्नै मोडेलको लागि अद्वितीय डिजाइन विकास गर्ने आफ्नो विचार थाहा दिन सक्नुहुन्छ! हामी तपाईंको सबै आवश्यकताहरू पूरा गर्न हाम्रो उत्तम सेवा दिन जाँदैछौं! Anebon लाई तुरुन्तै सम्पर्क गर्न सम्झनुहोस्!
पोस्ट समय: जनवरी-०९-२०२४