
Ефективність верстатного обладнання з ЧПК тісно пов’язана з його точністю, що робить його ключовим пріоритетом для компаній при закупівлі або розробці таких інструментів. Однак точність більшості нових верстатів часто не відповідає необхідним стандартам після виходу з заводу. Крім того, поява механічного припрацювання та зносу під час тривалого використання підкреслює життєво важливу потребу в регулюванні точності верстатів з ЧПК для забезпечення оптимальної продуктивності виробництва.
1. Компенсація люфту
Пом’якшення люфту. У верстатах з ЧПК помилки, що виникають через зворотні мертві зони рушійних компонентів у ланцюзі передачі подачі кожної координатної осі та зворотний зазор кожної пари механічної трансмісії руху, призводять до відхилень, коли кожна координатна вісь переходить від прямого руху до зворотного. Це відхилення, також відоме як зворотний зазор або втрачений імпульс, може значно вплинути на точність позиціонування та повторювану точність позиціонування верстата, коли використовуються сервосистеми з напівзамкнутим контуром. Крім того, поступове збільшення зазорів кінематичних пар через знос з часом призводить до відповідного збільшення відхилення заднього ходу. Тому регулярне вимірювання та компенсація зворотного відхилення кожної координатної осі верстата є обов’язковими.

Вимірювання люфту
Щоб оцінити зворотне відхилення, починайте з діапазону ходу осі координат. По-перше, установіть точку відліку, перемістивши задану відстань у прямому або зворотному напрямку. Після цього віддайте певну команду руху в тому ж напрямку, щоб подолати певну відстань. Далі перейдіть на таку саму відстань у протилежному напрямку та визначте дисперсію між опорним положенням і положенням зупинки. Як правило, багаторазові вимірювання (часто сім) проводяться в трьох місцях поблизу середини та обох крайніх точок діапазону подорожі. Потім у кожному місці обчислюється середнє значення, причому максимальне серед цих середніх значень використовується як вимірювання для зворотного відхилення. Для точного визначення значення зворотного відхилення під час вимірювань важливо переміститися на певну відстань.

При оцінці зворотного відхилення осі лінійного руху зазвичай використовують циферблатний індикатор або циферблатний індикатор як інструмент вимірювання. Якщо дозволяють обставини, для цієї мети також можна використовувати двочастотний лазерний інтерферометр. Під час використання циферблатного індикатора для вимірювань важливо переконатися, що підстава та ніж лічильника не висуваються надмірно, оскільки довга консоль під час вимірювання може спричинити переміщення основи лічильника через силу, що призведе до неточних показань та нереалістичних значень компенсації.
Впровадження методу програмування для вимірювання може підвищити зручність і точність процесу. Наприклад, щоб оцінити зворотне відхилення осі X на трикоординатному вертикальному верстаті, процес можна почати з притискання вимірювача до циліндричної поверхні шпинделя з подальшим виконанням призначеної програми для вимірювання.
N10G91G01X50F1000; перемістити верстак вправо
N20X-50;робочий стіл переміщається вліво, щоб усунути зазор передачі
N30G04X5; пауза для спостереження
N40Z50; Вісь Z піднята та зміщена
N50X-50: верстак рухається вліво
N60X50: верстак рухається праворуч і скидається
N70Z-50: скидання осі Z
N80G04X5: Пауза для спостереження
N90M99;
Важливо зауважити, що результати вимірювань можуть відрізнятися в залежності від різних робочих швидкостей верстака. Як правило, виміряне значення на низькій швидкості більше, ніж на високій швидкості, особливо коли навантаження на вісь верстата та опір руху є значними. На нижчих швидкостях робочий стіл рухається повільніше, що призводить до меншої ймовірності перевищення та переміщення, отже, виходячи з більш високого виміряного значення. З іншого боку, на вищих швидкостях більша ймовірність виникнення перевищення та переміщення через більшу швидкість робочого столу, що призводить до меншого виміряного значення. Підхід до вимірювання зворотного відхилення осі обертання відбувається за аналогічним процесом, що й для лінійної осі, з єдиною різницею в інструменті, який використовується для виявлення.

Компенсація люфту
Численні верстати з ЧПК, виготовлені в країні, демонструють точність позиціонування понад 0,02 мм, але не мають можливості для компенсації. У певних ситуаціях методи програмування можуть бути використані для досягнення одностороннього позиціонування та усунення люфту для таких верстатів. Поки механічний компонент залишається незмінним, ініціювати обробку інтерполяції можна, коли низькошвидкісне одностороннє позиціонування досягне початкової точки для інтерполяції. Якщо під час інтерполяційної подачі зустрічається зворотний напрямок, офіційна інтерполяція значення зворотного зазору може підвищити точність обробки інтерполяції та ефективно відповідатифрезерована частина з ЧПУвимоги до толерантності.
Для інших різновидів верстатів з ЧПК кілька адрес пам’яті в пристрої з ЧПК зазвичай призначаються для зберігання значення люфту кожної осі. Коли вісь верстата спрямовується на зміну напрямку руху, пристрій ЧПК автоматично отримує значення люфту осі, яке компенсує та виправляє значення команди переміщення координат. Це гарантує точне позиціонування верстата в командному положенні та пом’якшує несприятливий вплив зворотного відхилення на точність верстата.
Як правило, системи ЧПК оснащені одним доступним значенням компенсації люфту. Збалансувати точність руху на високій і низькій швидкості, а також удосконалити механізми стає складно. Крім того, значення зворотного відхилення, виміряне під час швидкого руху, може використовуватися лише як значення компенсації вхідного сигналу. Отже, досягнення рівноваги між швидкою точністю позиціонування та точністю інтерполяції під час різання виявляється складним.

Для систем ЧПК, таких як FANUC0i та FANUC18i, є дві доступні форми компенсації люфту для швидкого руху (G00) і повільного руху різання (G01). Залежно від обраного методу подачі система ЧПК автоматично вибирає та використовує різні значення компенсації для досягнення підвищеної точності обробки.
Значення люфту A, отримане з руху ріжучої подачі G01, слід ввести в параметр NO11851 (пробна швидкість G01 повинна визначатися на основі загальновживаної швидкості ріжучої подачі та характеристик верстата), тоді як значення люфту B з G00 має бути введено у параметр NO11852. Важливо зазначити, що якщо система ЧПК прагне виконати окремо задану компенсацію зворотного люфту, четверта цифра (RBK) номера параметра 1800 повинна бути встановлена на 1; інакше окремо визначена компенсація зворотного люфту не буде виконана. Компенсація зазору. G02, G03, JOG і G01 використовують однакове значення компенсації.

Компенсація за помилки висоти
Точне позиціонування верстатів з ЧПК передбачає оцінку точності, з якою рухомі компоненти верстата можуть досягати під керуванням системи ЧПК. Ця точність відіграє вирішальну роль у відмінності верстатів з ЧПК від звичайних. У відповідності з геометричною точністю верстата, це значно впливає на точність різання, особливо при обробці отворів. Похибка кроку при свердлінні отвору має суттєвий вплив. Здатність верстата з ЧПК оцінювати точність обробки залежить від досягнутої точності позиціонування. Таким чином, виявлення та виправлення точності позиціонування верстатів з ЧПК є важливими заходами для забезпечення якості обробки.
Процес вимірювання висоти
В даний час основним методом оцінки та обробки верстатів є використання двочастотних лазерних інтерферометрів. Ці інтерферометри працюють на основі принципів лазерної інтерферометрії та використовують довжину хвилі лазера в реальному часі як еталон для вимірювання, тим самим підвищуючи точність вимірювань і розширюючи діапазон застосувань.
Процес визначення висоти виглядає наступним чином:
- Встановити двочастотний лазерний інтерферометр.
- Розмістіть оптичний вимірювальний прилад уздовж осі верстата, який вимагає вимірювання.
- Вирівняйте лазерну головку, щоб переконатися, що вісь вимірювання паралельна або колінеарна з віссю руху верстата, таким чином попередньо вирівнявши оптичний шлях.
- Введіть параметри вимірювання, коли лазер досягне робочої температури.
- Виконайте встановлені процедури вимірювання, переміщаючи верстат.
- Обробити дані та створити результати.
Компенсація похибок висоти та автоматичне калібрування
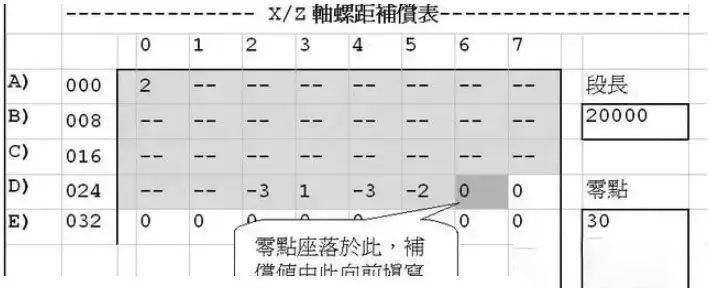
Коли виміряна похибка позиціонування верстата з ЧПК перевищує допустимий діапазон, виникає потреба виправити помилку. Один із поширених підходів передбачає обчислення таблиці компенсації помилок кроку та ручне введення її в систему ЧПК верстата для виправлення помилки позиціонування. Однак ручна компенсація може зайняти багато часу та бути схильною до помилок, особливо коли маємо справу з численними точками компенсації по трьох або чотирьох осях верстата з ЧПК.
Для спрощення цього процесу було розроблено рішення. З’єднавши комп’ютер і контролер ЧПК верстата через інтерфейс RS232 і використовуючи програмне забезпечення для автоматичного калібрування, створене у VB, можна синхронізувати лазерний інтерферометр і верстат з ЧПК. Ця синхронізація дозволяє автоматично виявляти точність позиціонування верстата з ЧПК і реалізувати автоматичну компенсацію помилки кроку. Спосіб компенсації включає:
- Створення резервної копії існуючих параметрів компенсації в системі керування ЧПК.
- Створення верстатної програми ЧПК для поточкового вимірювання точності позиціонування за допомогою комп’ютера, яка потім передається в систему ЧПК.
- Автоматичне вимірювання похибки позиціонування кожної точки.
- Створення нового набору параметрів компенсації на основі попередньо визначених точок компенсації та передача їх у систему ЧПК для автоматичної компенсації кроку.
- Неодноразова перевірка точності.
Ці спеціальні рішення спрямовані на підвищення точності верстатів з ЧПК. Тим не менш, важливо відзначити, що точність різних верстатів з ЧПК може відрізнятися. У результаті верстати повинні бути відкалібровані відповідно до їх індивідуальних обставин.
Якщо компенсація помилок не виконується на верстаті, який вплив це матиме на виготовлені деталі з ЧПК?
Якщо на верстаті не враховано компенсацію помилок, це може призвести до невідповідностей уЧПУ частинивиготовлені. Наприклад, якщо верстат має неналагоджену помилку позиціонування, справжнє положення інструменту або заготовки може відрізнятися від запрограмованого положення, зазначеного в програмі ЧПУ, що призводить до неточностей розмірів і геометричних помилок у виготовлених деталях.
Наприклад, якщо фрезерний верстат з ЧПК має невідрегульовану помилку позиціонування по осі X, фрезеровані пази або отвори в заготовці можуть бути зміщені або мати неправильні розміри. Подібним чином, під час роботи на токарному верстаті невідрегульовані помилки позиціонування можуть спричинити неточності в діаметрі або довжині точених деталей. Ці розбіжності можуть призвести до виходу з ладу невідповідних частин
Anebon змусить кожну наполегливу роботу стати чудовим і чудовим, і прискорить наші заходи для виходу з рангу міжконтинентальних високоякісних і високотехнологічних підприємств для Китаю Постачальник золота для OEM, Customпослуги обробки з ЧПУ, Послуги з виготовлення листового металу, послуги фрезерування. Anebon зробить вашу індивідуальну покупку, щоб задовольнити вас! Бізнес Anebon створює кілька відділів, включаючи відділ випуску, відділ доходів, відділ відмінного контролю та центр обслуговування тощо.
Заводське постачання КитайТочна частина та алюмінієва частина, Ви можете повідомити Anebon про свою ідею щодо розробки унікального дизайну для вашої власної моделі, щоб запобігти надлишку подібних деталей на ринку! Ми надамо найкращий сервіс, щоб задовольнити всі ваші потреби! Не забудьте негайно зв’язатися з Anebon!
Час публікації: 09 січня 2024 р