
CNC torna tezgahlarında hassas takım ayarı için kaç yöntem bulunduğunu biliyor musunuz?
Dokunma Probu Yöntemi: - Bu yöntem, makinenin referans noktasına göre konumunu ölçmek için takıma dokunan bir prob kullanır. Takım çapı ve uzunluğu hakkında doğru veriler verir.
Takım Ön Ayarlayıcı:Takımın makinenin dışındaki boyutlarını ölçmek için bir takım ön ayar fikstürü kullanılır. Bu yöntem, aletin hızlı ve doğru şekilde ayarlanmasına olanak sağlar.
Takım Ofseti Yöntemi:– Bu yöntemde operatör, kumpas ve mikrometre gibi aletler kullanarak aletin uzunluğunu ve çapını ölçer. Değerler daha sonra makinenin kontrol sistemine girilir.
Lazer Takım Ölçümü:Takım boyutlarını ayarlamak ve ölçmek için lazer sistemleri kullanılır. Takımın kesici kenarına bir lazer ışığı ışınını yansıtarak doğru ve hızlı takım verileri sağlarlar.
Görüntü Tanıma Yöntemi:Gelişmiş bilgisayar sistemleri, takım boyutlarını otomatik olarak hesaplamak için görüntü tanıma teknolojisini kullanabilir. Bunu, aletin görüntülerini alarak, özelliklerini analiz ederek ve ardından ölçümleri hesaplayarak yaparlar.
Bu çok faydalı bir makale. Makalede öncelikle CNC torna tezgahlarında yaygın olarak kullanılan "deneme kesme takım ayarlama yönteminin" arkasındaki prensipler ve fikirler tanıtılmaktadır. Daha sonra CNC tornalama sistemleri için kesici takım ayarlarının dört manuel deneme yöntemini sunar. Takım ayarlarının doğruluğunu artırmak için “otomatik kesme – ölçme – hata telafisine” dayalı, program kontrollü bir otomatik deneme kesme yöntemi geliştirildi. Dört doğru takım ayarlama yöntemi de özetlenmiştir.
1. CNC Torna Tezgahları İçin Takım Ayarlama Yönteminin Arkasındaki Prensip ve Fikirler
CNC torna tezgahı takım ayarlama ilkelerini anlamak, takım ayarlama hakkında net fikirlere sahip olmak, takım ayarlama operasyonlarında uzmanlaşmak ve yeni yöntemler önermek isteyen operatörler için önemlidir. Takım ayarı, takım tezgahı koordinat sistemi programlanırken değişen, iş parçası koordinat sisteminin başlangıç konumunu belirler. Takım ayarlama, bir referans takım programının başlangıç noktası için makine koordinatlarının elde edilmesini ve bu takıma göre takım ofsetinin belirlenmesini içerir.
Deneme kesme yöntemini kullanarak takım ayarlamanın ardındaki kavram ve fikirleri göstermek için aşağıdaki kurallar kullanılmıştır. Hua Medieval Star Teaching Turning System'i (uygulama yazılımının sürüm numarası 5.30) kullanın; program orijini için iş parçasının sağ uç yüzünün ortasını kullanın ve bunu G92 komutuyla ayarlayın. Çap programlama, program başlangıç noktası H'nin iş parçası koordinatları (100,50); dört aleti alet tutucusuna takın. 1 No.lu takım 90 derecelik bir kaba tornalama takımıdır ve 2 No.lu Referans takımı 90 derecelik bir dış daire ince tornalama takımıdır. bıçak, No. Hayır. 4. bıçak 60 derecelik açıya sahip üçgen dişli bir bıçaktır (makaledeki örneklerin hepsi aynıdır).
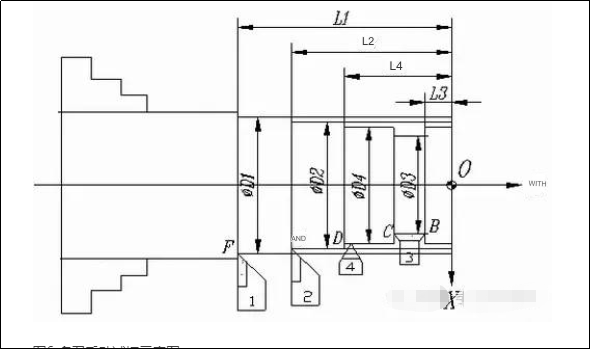
Takım ayarı için "makine takımı" koordinatları kullanılır. Şekil 1'de gösterildiği gibi, referans takım "manuel olarak test edilerek iş parçasının dış dairesini ve uç yüzünü keser ve XZ takım tezgahı koordinatlarını ekrana kaydeder. O program orijini için takım tezgahı koordinatları, A ve O noktasındaki takım tezgahı koordinatları arasındaki ilişkiden türetilir: XO=XA – Phd, ZO=ZA. O noktasına (100,50) göre H için iş parçası koordinatlarını kullanarak, sonunda H noktası için takım tezgahı koordinatlarını elde edebiliriz: XH=100 – Phd, ZH=ZA+50. Bu iş parçası koordinat sistemi, takım ucunun referans takım üzerindeki konumuna dayanmaktadır.
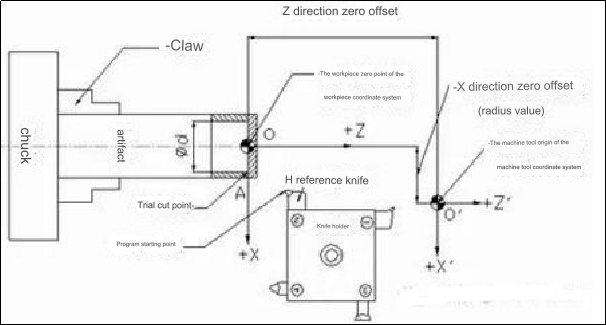
Şekil 1 Manuel deneme kesimi ve takım ayarları için şematik diyagram
Şekil 2'de, A noktası ile takım ucu B arasındaki kayma, takım tutucuya kenetlenen takımların X ve Z yönündeki uzantıları ve konumlarındaki farklılıklar nedeniyle meydana gelir. İş parçasının orijinal koordinat sistemi artık geçerli değil. Ayrıca her alet kullanım sırasında farklı oranda aşınacaktır. Bu nedenle her takım için takım ofsetleri ve aşınma değerlerinin telafi edilmesi gerekir.
Takım ofsetini belirlemek için her takımın iş parçası üzerindeki belirli bir referans noktasına (Şekil 1'deki A veya B noktası) hizalanması gerekir. CRT, referans olmayan takımların takım ofsetlerinden farklı olan takım tezgahı koordinatlarını görüntüler. Bu nedenle aynı noktada konumlanırlar. Manüel hesaplamalar veya yazılım hesaplamaları kullanılarak, takım tezgahının koordinatları referans takımın koordinatlarından çıkarılır. Daha sonra standart olmayan her cihaz için takım ofseti hesaplanır.
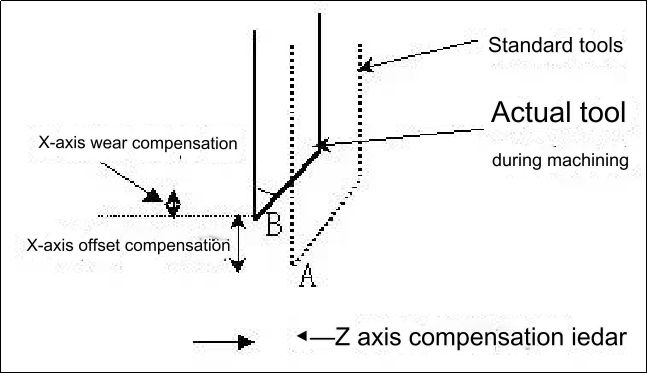
Şekil 2 Takım ofseti ve aşınma telafisi
Manuel deneme kesici takım ayarlarının doğruluğu sınırlıdır. Bu, kaba işleme olarak bilinir. Şekil 3'te gösterildiği gibi, işleme toleransları dahilinde daha doğru sonuçlar elde etmek içincnc oto parçasıbasit bir otomatik deneme kesme programı tasarlanabilir. Referans bıçağı “otomatik kesme-ölçüm-hata telafisi” konsepti kullanılarak sürekli olarak değiştirilmektedir. Referans olmayan takımın takım ofseti ve program başlangıç noktası, işleme talimatının değeri ile ölçülen gerçek değer arasındaki farkın doğruluk gerekliliklerini karşıladığından emin olmak için kullanılır. Hassas takım ayarı bu aşamada gerçekleşen takım ayarıdır.
İlk düzeltmeden sonra standart olmayan ofsetlerin düzeltilmesi yaygındır. Bunun nedeni, referans takımın başlangıç noktasının konumunun doğru olmasının sağlanmasının, doğru takım ofsetleri için bir ön koşul olmasıdır.
Bu temel takım ayarlama işlemi, bu iki aşamanın birleştirilmesiyle gerçekleştirilir: takım ayarlama referansı için makine takımı koordinatlarını elde etmek amacıyla bıçağı referansla manuel olarak test kesimi yapın. – Referans olmayan her takımın takım ofsetlerini hesaplayın veya otomatik olarak hesaplayın. – Referans bıçağı programın yaklaşık başlangıcında bulunur. – Referans bıçağı tekrar tekrar deneme kesme programını çağırır. Takım tutucu, hataları telafi etmek ve başlangıç noktasının konumunu düzeltmek için MDI veya adım modunda hareket ettirilecektir. Boyutu ölçtükten sonra tabansız bıçak tekrar tekrar test kesim programını çağıracaktır. Takım ofseti bu ofsete göre düzeltilir. Bu, referans aletinin programın tam başlangıcında sabit olacağı anlamına gelir.
Şekil 3 Çok Bıçaklı Deneme Kesimi için Takım Ayarının Şematik Diyagramı
Kaba bıçak yerleştirme tekniklerine genel bakış
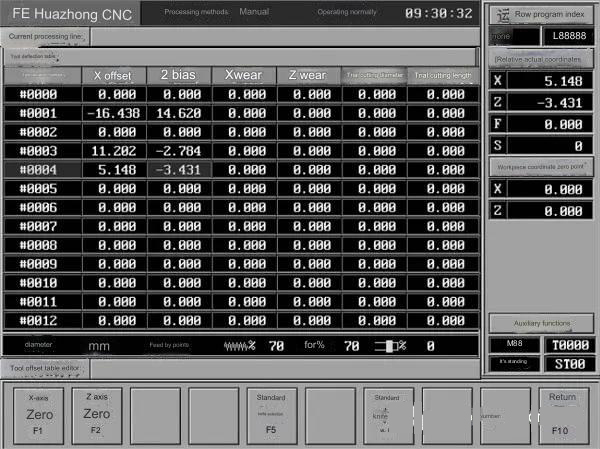
Takım kurulumuna hazırlanmak için aşağıdaki yöntemlerden herhangi birini kullanabilirsiniz: takım ofseti tablosuna erişmek için sistem MDI alt menüsünde F2 tuşuna basın. Vurgu çubuğunu her bir araca karşılık gelen takım numarası konumuna taşımak için tuşlarını kullanın ve F5 düğmesine basın. #0000 ve #0001 takım ofset numaralarının X ve Z ofset değerlerini değiştirin, ardından F5 tuşuna basın.
1) Referans takımı seçerek takım ofseti yöntemini otomatik olarak ayarlayın.
Aracı ayarlama adımları Şekil 1 ve 4'te gösterilmektedir.
Tuşlarla vurgulanan mavi çubuk, 2 numaralı referans takım için #0002 takım ofsetini hizalamak üzere hareket ettirilebilir. Referans aracı 2. No.2'yi ayarlamak için F5 tuşuna basın. 2 aracı varsayılan araç olarak ayarlanacaktır.
2) Dış daireyi referans aletle kesin ve X takım tezgahı koordinatlarını not edin. Aleti geri çektikten sonra makineyi durdurun ve mil bölümünün dış çapını ölçün.
3) Referans bıçağı “jog+step” yöntemiyle kaydedilen A noktasına geri döner. Testin kesme çapı ve testin kesme uzunluğu için sütunlara sırasıyla PhD ve sıfır girin.
4) Standart takımı geri çekin ve standart olmayan takımın numarasını seçin. Ardından aracı manuel olarak değiştirin. Standart olmayan her takımın takım ucu, "jog+step" yöntemi kullanılarak A noktasıyla görsel olarak hizalanmalıdır. Alet görsel olarak hizalandıktan sonra ilgili ofseti ayarlayın. Deneme kesme uzunluğu ve çapı sütunlarına sıfır ve PhD girerseniz, referans olmayan tüm bıçakların bıçak ofsetleri otomatik olarak X ofseti ve Z ofseti sütununda görüntülenecektir.
5) Referans aracı A noktasına döndüğünde MDI, programın başlangıç noktasına ulaşmak için “G91 G00/veya” G01 X[100 PhD] Z50'yi çalıştıracaktır.
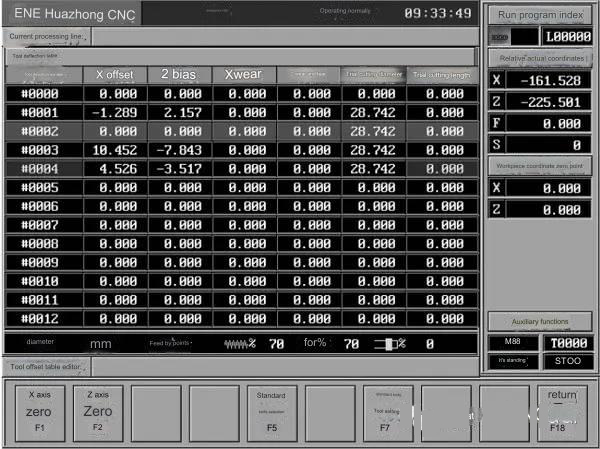
Şekil 4 Standart takım için takım ofsetini otomatik olarak ayarlayan referans takımın şematik diyagramı
2. Referans aletinin koordinatlarını, takım ayarı referans noktasında sıfıra ayarlayın ve takım ofseti yöntemini otomatik olarak görüntüleyin
Şekil 1 ve Şekil 5'te gösterildiği gibi takım ayarlama adımları aşağıdaki gibidir:
1) Yukarıdaki adım (2) ile aynı.
2) Referans bıçağı, kaydedilen değere göre "jog + step" yöntemiyle deneme kesme noktası A'ya geri döner.
3) Şekil 4'te gösterilen arayüzde, "X eksenini sıfıra ayarlamak" için F1 tuşuna basın ve "Z eksenini sıfıra ayarlamak" için F2 tuşuna basın. Daha sonra CRT tarafından görüntülenen “göreceli gerçek koordinatlar” (0, 0) olur.
4) Referans olmayan takımı, takım ucu görsel olarak A noktasıyla hizalanacak şekilde manüel olarak değiştirin. Şu anda, CRT'de görüntülenen "göreceli gerçek koordinatlar" değeri, takımın referans takıma göre takım ofsetidir. Maviyi hareket ettirmek için ▲ ve tuşlarını kullanın. Referans olmayan takımın takım ofset numarasını vurgulayın, kaydedin ve karşılık gelen konuma girin.
5) Önceki adımla (5) aynı.
Şekil 5 Takım Ayarı referans noktaları koordinatlarında Referans Takım sıfıra ayarlandığında otomatik olarak görüntülenen Takım Ofsetinin Şematik Diyagramı.
3. Bıçak ofseti yöntemi, dış dairesel şaft bölümünün birden fazla bıçağıyla yapılan deneme kesiminin manuel olarak hesaplanmasıyla hesaplanır.
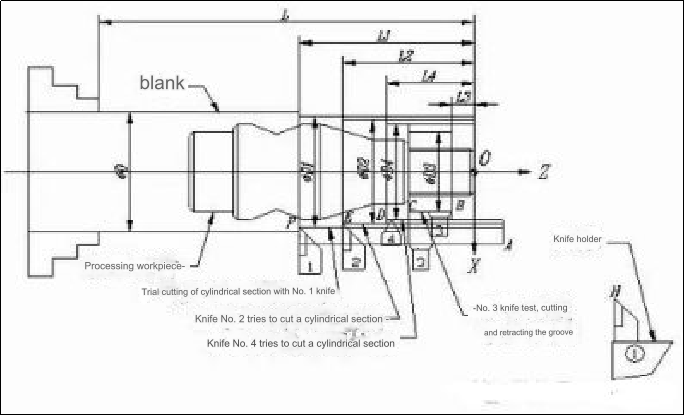
Şekil 6'da gösterildiği gibi sistem, 1, 2 ve 4 numaralı bıçakları manuel olarak hizalar ve bir ekseni keser. Daha sonra her bir bıçağın kesme uçları için makine koordinatlarını kaydeder. (Şekil 6'daki F, D ve E noktaları). Her segmentin çapını ve uzunluğunu ölçün. 1 numaralı kesme bıçağını değiştirin. Resimde gösterildiği gibi bir alet girintisi kesin. Kesici bıçağı sağ uçla hizalayın, B noktasının koordinatlarını kaydedin ve L3 ile PhD3'ü şekle göre ölçün. Her takım için F, E ve D noktaları ile O orijini arasındaki artan koordinat ilişkisi, yukarıdaki veriler karşılaştırılarak belirlenebilir.
Daha sonra takım tezgahı koordinatlarının (X2-PhD2+100 ve Z2-L2+50) olduğu ve referans takıma karşılık gelen program başlangıç noktasının takım tezgahı koordinatları olduğu görülebilir. Hesaplama yöntemi tablo 1'de gösterilmektedir. Hesaplanan ve kaydedilen değerleri boşluklara girin. Not: Deneme kesme mesafesi, iş parçasının koordinat sıfır noktası ile Z yönünde deneme kesiminin bitiş noktası arasındaki mesafedir. Pozitif ve negatif yönler koordinat ekseni tarafından belirlenir.
Şekil 6 Çok bıçaklı manuel deneme kesiminin şematik diyagramı
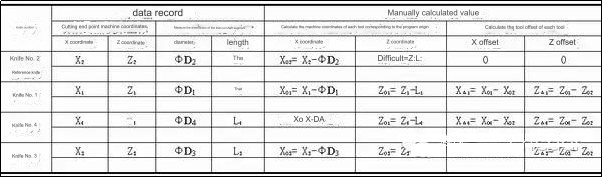
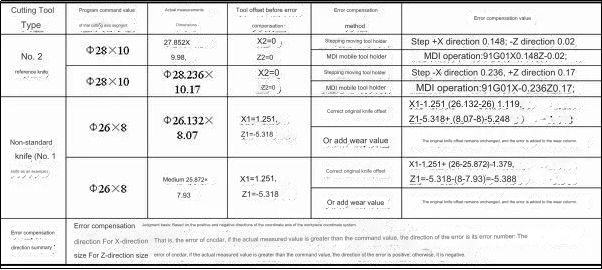
Tablo 1 Standart olmayan Takımlar için takım ofsetlerinin hesaplanması
Bu yöntem, test kesme noktalarının görsel olarak hizalanması ihtiyacını ortadan kaldırdığı için basit bir deneme kesme prosedürüne olanak tanır. Ancak bıçak ofsetinin manuel olarak hesaplanması gerekir. Formülü içeren sayfayı yazdırıp boşlukları doldurursanız, takım ofsetini hızlı bir şekilde hesaplayabilirsiniz.
Şekil 7 Century Star CNC sisteminde otomatik takım ayarı için şematik diyagram
4th Century Star CNC sistemi için çok takımlı otomatik takım seti yöntemi
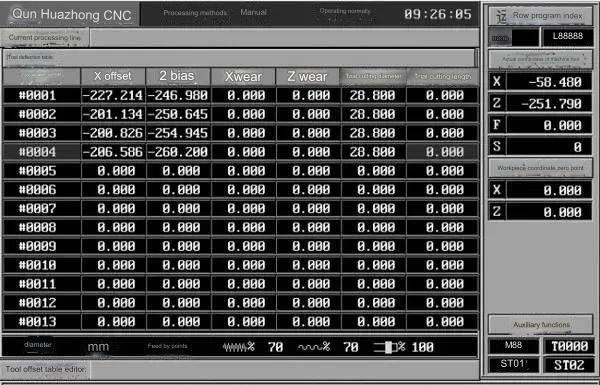
Takım ofseti için yukarıda belirtilen yöntemlerin tümü göreceli yöntemlerdir. Profesyonel personel parametre ayarlama ve sistem testini gerçekleştirdikten sonra HNC-21T, kullanıcıların araçları ayarlarken "mutlak ofset yöntemini" seçmesine olanak tanır. Parça işleme programlamasında mutlak takım ofseti, göreceli takım kapatma yönteminden biraz farklıdır. İş parçası koordinat sistemleri için G92 veya G54'ün kullanılması veya takım telafisinin iptal edilmesi gerekli değildir. Örnek için O1005 programına bakın. Şekil 6'da gösterildiği gibi, sistem sıfıra döndükten sonra, her bıçağın manuel olarak bir silindir bölümünü kesmeyi denemesine izin verin.
Uzunluğu ve çapı ölçtükten sonra her bıçak için takım ofset numaralarını girin. Deneme kesme uzunluğu, deneme kesme çapı sütununda listelenmiştir. Sistem yazılımı, “Dış Şaft Segmentinin Çoklu Kesimi – Bıçak Ofsetinin Manuel Hesaplanması” bölümünde açıklanan yöntemi kullanarak, programın kökenine göre her bıçağın takım tezgahı koordinatlarını otomatik olarak hesaplayabilmektedir. Bu takım ayarlama yöntemi en hızlı yöntemdir ve özellikle endüstriyel üretim için uygundur.
Beş doğru takım ayarlama tekniğinin özeti
Hassas takım ayarının prensibi “otomatik ölçüm, otomatik deneme kesimi ve hata telafisidir”. Hata telafisi iki kategoriye ayrılabilir: Referans aracı MDI işlemi için veya programın başlangıç konumunu telafi etmek için adım hareketli takım direkleri için; ve standart olmayan takım için takım ofseti veya aşınma değerlerini telafi etmek. Karışıklığı önlemek için Tablo 2 değerleri hesaplamak ve kaydetmek üzere tasarlanmıştır.
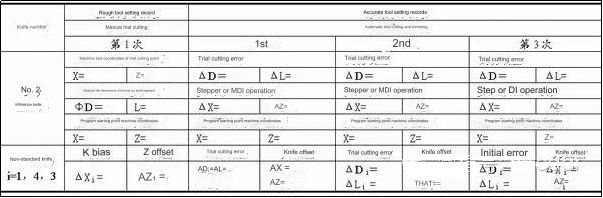
Tablo 2 Deneme Kesme Yöntemi için Takım Ayarı Kayıt Tablosu (Birim: mm
1. Referans takım başlangıç noktasını düzelttikten sonra standart olmayan her takım için ofset yöntemini değiştirin.
Aracı ayarlama adımları Şekil 3'te gösterilmektedir.
Kaba takım kalibrasyonundan sonra referans takım programın başlangıcında olmalıdır. Standart olmayan her takımın ofsetini tablonun uygun konumuna girin.
Bir deneme kesimi yapmak amacıyla PhD2xL2'yi işlemek için O1000 programını kullanın.
Daha sonra parçalı kesme milinin çapını ve uzunluğunu ölçün, bunları komut programındaki değerle karşılaştırın ve hatayı belirleyin.
MDI hata değeri veya adım hareketi MDI hata değerinden büyükse programın başlangıç noktasını değiştirin.
5) O1000 komut değerini ölçülen boyutlara göre dinamik olarak değiştirin ve programı kaydedin. Referans aletinin başlangıç konumu doğruluk aralığına gelene kadar (2) adımlarını tekrarlayın. Düzeltilen programın başlangıç noktasının takım tezgahı koordinatlarını not edin. Koordinatları sıfıra ayarlayın.
6) Her deneme kesimi için O1001'i (bıçak no. 1, No. O1002 (bıçak no. 3) çevirin ve her bölümün Li uzunluğunu (i=1, 2, 3) ve PhDi çapını ölçün.
7) Tablo 3 yöntemini kullanarak hataları telafi edin.
İşleme hataları doğruluk aralığına gelinceye ve referans takım programın başlangıç noktasında durdurulana ve hareket etmeyene kadar 6 ila 7 arasındaki adımları tekrarlayın.
Tablo 3 Silindirik şaft bölümlerinin otomatik deneme kesimi için hata telafisi örneği (birim: mm).
2. Her takımın başlangıç konumunu ayrı ayrı değiştirmek
Bu yöntemin takım ayarlama prensibi, her takımın kendi başlangıç program noktasını ayarlaması ve böylece dolaylı olarak aynı başlangıç konumuna hizalanmasıdır.
Aracı ayarlama adımları Şekil 3'te gösterilmektedir.
Kaba takım kalibrasyonundan sonra No. Kaba takım kalibrasyonu ve ofsetlerin kaydedilmesinden sonra, 2 No.lu referans takım programın başlangıcında olmalıdır.
Birinci doğru takım ayarlama yönteminin 2)'den (5)'e kadar olan adımları aynıdır.
Deneme kesimi gerçekleştirmek için O1000 programını kullanın. Her bölümün Li uzunluğunu ve PhDi çapını ölçün.
Adım hareket aracı veya MDI takım tutucusu, hataları telafi eder ve her takımın program başlangıç noktasını ayarlar.
Standart olmayan her program takımının başlangıç konumu izin verilen doğruluk aralığına gelinceye kadar (6) adımlarını tekrarlayın.
Takım ofseti tablosuna, CRT'de gösterilen ilgili koordinatların takım ofseti sayısına karşılık gelen X ofseti ve Z ofseti sütununa girilmesiyle erişilebilir. Bu yöntem kullanışlı ve basittir. Bu yöntem basit ve kullanışlıdır.
3. Takım referans programının başlangıç konumunu değiştirdikten sonra, standart olmayan takımlar için tüm ofset yöntemlerini aynı anda değiştirin.
Yöntem, ilk doğru takım ayarlama yöntemiyle aynıdır. İkisi arasındaki tek fark, 7. adımda üç bıçağı aynı anda çağıran O1003 programının çağrılmasıdır (O1004 No'yu kaldırır. O1003 programı, takım işlemenin 2 No'lu bölümünün yerini alır. Geri kalan adımlar aynıdır.
6. Bu yöntemle dört bıçak aynı anda tamir edilebilir
İşleme hatasını bulmak için, ilgili takım ofseti yöntemini kullanarak her bölümün çapını (PhDi) ve her bölümün uzunluğunu Li (i=2, 1, 4) ölçün. Referans takım için MDI veya takım tutucuya kademeli hareket kullanın. Program başlangıç noktasını değiştirin. Standart olmayan takımlar için öncelikle orijinal ofseti kullanarak ofseti düzeltin. Ardından yeni ofseti girin. Referans takıma ilişkin işleme hatası da aşınma sütununa girilmelidir. Takımı kalibre etmek için mutlak takım ofseti kullanılıyorsa O1005 deneme kesme programını çağırın. Ardından, ilgili takım ofset numaralarının aşınma sütunlarındaki takımların işleme hatalarını telafi edin.
CNC torna tezgahları için doğru takım ayarlama yöntemini seçmenin kesme kalitesi üzerindeki etkisi nedir?CNC işleme parçaları?
Doğruluk ve kesinlik:
Alet doğru şekilde ayarlanırsa kesme aletleri düzgün şekilde hizalanacaktır. Bu, işleme operasyonlarındaki doğruluğu ve hassasiyeti doğrudan etkiler. Yanlış takım ayarı boyutsal hatalara, kötü yüzey kalitesine ve hatta hurdaya neden olabilir.
Tutarlılık:
Tutarlı takım ayarları, işleme operasyonlarının tekdüzeliğini ve birden fazla parçada tutarlı kaliteyi sağlar. Yüzey kalitesi ve boyutlardaki farklılıkları azaltır ve sıkı toleransların korunmasına yardımcı olur.
Takım Ömrü ve Takım Aşınması:
Doğru bir takım ayarı, takımın iş parçasına düzgün bir şekilde geçmesini sağlayarak takım ömrünü en üst düzeye çıkarabilir. Uygun olmayan takım ayarları, takımların aşırı aşınmasına ve kırılmasına yol açarak takım ömrünü kısaltabilir.
Üretkenlik ve Verimlilik
Etkili takım ayarlama teknikleri tezgah kurulum süresini azaltabilir ve çalışma süresini artırabilir. Boşta kalma sürelerini en aza indirip kesme süresini en üst düzeye çıkararak verimliliği artırır. Bu, daha hızlı takım değişimine olanak tanır ve genel işleme sürelerini azaltır.
Operatör Güvenliği
Operatörün güvenliği, doğru takım ayarlama yönteminin seçilmesinden etkilenebilir. Görüntü tanıma veya lazer alet ölçümü gibi bazı yöntemler, aletlerin manuel olarak kullanılması ihtiyacını ortadan kaldırarak yaralanma olasılığını azaltır.
Anebon'un hedefi, üretimden kaynaklanan mükemmel şekil bozukluklarını anlamak ve 2022 Yüksek Kalite Paslanmaz Çelik Alüminyum Yüksek Hassasiyetli Özel Üretim için tüm kalbimizle yurtiçi ve yurtdışındaki müşterilere en üst düzeyde desteği sağlamaktır.CNC TornalamaFrezeleme,CNC yedek parçalarıHavacılık ve Uzay için, Uluslararası pazarımızı genişletmek amacıyla, Anebon ağırlıklı olarak denizaşırı müşterilerimize en yüksek kalitede performans mekanik parçalar, frezelenmiş parçalar ve cnc torna hizmeti sunmaktadır.
Çin toptan Çin Makine Parçaları ve CNC İşleme Servisi, Anebon "yenilik, uyum, takım çalışması ve paylaşım, yollar, pragmatik ilerleme" ruhunu desteklemektedir. Bize bir şans verin, biz de yeteneğimizi kanıtlayalım. Anebon, sizin nazik yardımınızla, sizinle birlikte parlak bir gelecek yaratabileceğimize inanıyor.
Gönderim zamanı: 19 Ekim 2023