
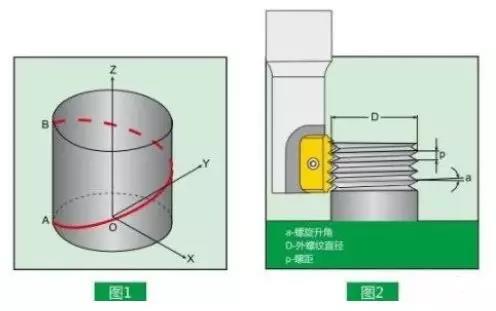
เพื่อให้บรรลุผลการกัดเกลียว เครื่องจักรต้องมีระบบเชื่อมต่อแบบสามแกน การประมาณค่าแบบเฮลิคอลเป็นหน้าที่ของเครื่องมือกล CNC เครื่องมือจะควบคุมเครื่องมือเพื่อให้ทราบวิถีโคจรของขดลวด การประมาณค่าแบบเฮลิคอลจะเกิดขึ้นจากการประมาณค่าแบบวงกลมของระนาบและการเคลื่อนที่เชิงเส้นที่ตั้งฉากกับระนาบ
ตัวอย่างเช่น: วิถีโคจรกังหันจากจุด A ไปยังจุด B (รูปที่ 1) เชื่อมโยงกันด้วยการเคลื่อนที่แบบประมาณค่าแบบวงกลมของระนาบ XY และการเคลื่อนที่เชิงเส้นตรงแบบ Z
สำหรับระบบ CNC ส่วนใหญ่ ฟังก์ชันนี้สามารถใช้งานได้ตามคำแนะนำที่แตกต่างกันสองคำสั่งต่อไปนี้
G02: คำสั่งการแก้ไขแบบวงกลมเข็มทันที
G03: คำแนะนำการแก้ไขแบบวงกลมทวนเข็มนาฬิกา
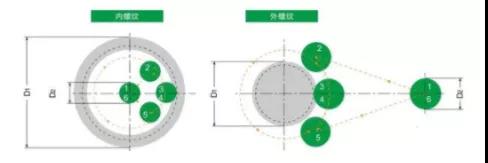
ที่การกัดเกลียวการเคลื่อนที่ (รูปที่ 2) แสดงให้เห็นว่าเกิดขึ้นจากการหมุนของเครื่องมือเองและการเคลื่อนที่แบบเฮลิคอลของเครื่องจักร ระหว่างการประมาณค่าของวงกลมอิกริด
การใช้รูปทรงเรขาคณิตของเสาประกอบกับการเคลื่อนที่ของเครื่องมือเพื่อเลื่อนระยะพิทช์ไปในทิศทางแกน Z ด้ายที่ต้องการจะถูกประมวลผล สามารถใช้การกัดเกลียวได้
วิธีการตัดสามวิธีต่อไปนี้
1 วิธีการตัดส่วนโค้ง
② วิธีการตัดเข้าในแนวรัศมี
3 วิธีการเข้าวงสัมผัส
1 วิธีการตัดส่วนโค้ง
ด้วยวิธีนี้ เครื่องมือจะตัดได้อย่างราบรื่น โดยไม่ทิ้งรอยตัดและไม่มีการสั่นสะเทือน แม้ว่าจะแปรรูปวัสดุแข็งก็ตาม การตั้งโปรแกรมวิธีนี้ซับซ้อนกว่าวิธีการตัดเข้าในแนวรัศมีเล็กน้อย และขอแนะนำให้ใช้วิธีนี้เมื่อทำการกลึงเกลียวที่มีความแม่นยำ
1-2: การวางตำแหน่งอย่างรวดเร็ว
2-3: เครื่องมือจะตัดในแนวสัมผัสตามการป้อนส่วนโค้ง ในขณะที่แก้ไขการป้อนตามแกน Z
3-4: วงกลมเต็ม 360 °สำหรับการเคลื่อนที่ของเกลียว, การเคลื่อนที่ตามแนวแกนหนึ่งตะกั่ว
4-5: เครื่องมือจะตัดในแนวสัมผัสตามแนวป้อนส่วนโค้งและทำการเคลื่อนที่แบบประมาณค่าตามแกน Z
5-6: กลับอย่างรวดเร็ว
② วิธีการตัดเข้าในแนวรัศมี
วิธีนี้เป็นวิธีที่ง่ายที่สุด แต่บางครั้งอาจเกิดสองสถานการณ์ต่อไปนี้
ขั้นแรกจะมีรอยแนวตั้งเล็กมากที่จุดตัดเข้าและจุดตัด แต่จะไม่ส่งผลกระทบต่อคุณภาพของด้าย
ประการที่สอง เมื่อแปรรูปวัสดุที่แข็งมาก เมื่อตัดฟันจนเกือบเต็ม เนื่องจากพื้นที่สัมผัสระหว่างเครื่องมือกับชิ้นงานเพิ่มขึ้น อาจทำให้เกิดปรากฏการณ์การสั่นสะเทือนได้ เพื่อหลีกเลี่ยงการสั่นสะเทือนเมื่อตัดเป็นประเภทฟันเต็ม ควรลดปริมาณการป้อนลงเหลือ 1/3 ของปริมาณการแทรกแบบเกลียวให้มากที่สุด

1-2: การวางตำแหน่งอย่างรวดเร็ว
2-3: วงกลมเต็ม 360 °สำหรับการเคลื่อนที่แบบเฮลิคอลอินเทอร์โพเลต หนึ่งลีดสำหรับการเคลื่อนที่ตามแนวแกน
3-4: การส่งคืนในแนวรัศมี
3 วิธีการเข้าวงสัมผัส
วิธีนี้ง่ายมากและมีข้อดีของวิธีการตัดส่วนโค้ง แต่เหมาะสำหรับการกัดเกลียวภายนอกเท่านั้น
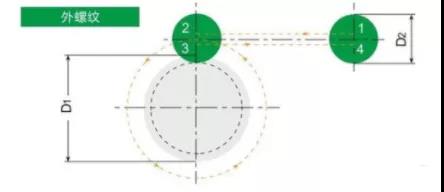
1-2: การวางตำแหน่งอย่างรวดเร็ว
2-3: วงกลมเต็ม 360 °สำหรับการเคลื่อนที่ของเกลียว การเคลื่อนที่ตามแนวแกนด้วยลีดเดียว
3-4: กลับอย่างรวดเร็ว
www.anebon.com
เวลาโพสต์: Dec-01-2019