
Adakah anda tahu berapa banyak kaedah yang ada untuk tetapan alat yang tepat pada mesin pelarik CNC?
Kaedah Siasatan Sentuh: - Kaedah ini menggunakan probe yang menyentuh alat untuk mengukur kedudukannya berbanding dengan titik rujukan mesin. Ia memberikan data yang tepat mengenai diameter dan panjang alat.
Pra-Setter Alat:Lekapan alat-pra-penetap digunakan untuk mengukur dimensi alat di luar mesin. Kaedah ini membolehkan persediaan alat yang cepat dan tepat.
Kaedah Offset Alat:– Dalam kaedah ini, operator mengukur panjang dan diameter alat menggunakan alat seperti angkup dan mikrometer. Nilai tersebut kemudiannya dimasukkan ke dalam sistem kawalan mesin.
Pengukuran Alat Laser:Sistem laser digunakan untuk menetapkan dan mengukur dimensi alat. Dengan memancarkan pancaran cahaya laser ke tepi pemotongan alat, mereka menyediakan data alat yang tepat dan cepat.
Kaedah Pengecaman Imej:Sistem komputer lanjutan boleh menggunakan teknologi pengecaman imej untuk mengira secara automatik dimensi alat. Mereka melakukan ini dengan mengambil imej alat, menganalisis ciri-cirinya dan kemudian mengira ukuran.
Ini adalah artikel yang sangat berguna. Artikel ini memperkenalkan terlebih dahulu prinsip dan idea di sebalik "kaedah penetapan alat pemotongan percubaan" yang biasa digunakan dengan mesin pelarik CNC. Ia kemudiannya memperkenalkan empat kaedah manual tetapan alat pemotong percubaan untuk sistem pemusing CNC. Untuk meningkatkan ketepatan tetapan alatnya, kaedah pemotongan percubaan automatik terkawal program berdasarkan "pemotongan automatik - mengukur - mengimbangi ralat" telah dibangunkan. Empat kaedah penetapan alat yang tepat juga telah diringkaskan.
1. Prinsip dan idea di sebalik kaedah penetapan alat untuk mesin bubut CNC
Memahami prinsip tetapan alat pelarik CNC adalah penting bagi pengendali yang ingin mengekalkan idea yang jelas tentang tetapan alat, menguasai operasi tetapan alat dan mencadangkan kaedah baharu. Tetapan alat adalah menentukan kedudukan asal sistem koordinat bahan kerja, yang berubah apabila memprogramkan sistem koordinat alat mesin. Tetapan alat melibatkan mendapatkan koordinat mesin untuk titik permulaan program alat rujukan, dan menentukan mengimbangi alat relatif kepada alat tersebut.
Konvensyen berikut digunakan untuk menunjukkan konsep dan idea di sebalik penetapan alat menggunakan kaedah pemotongan percubaan. Gunakan Hua Medieval Star Teaching Turning System (nombor versi 5.30 perisian aplikasi); gunakan bahagian tengah muka hujung kanan pada bahan kerja untuk asal program dan sediakannya dengan arahan G92. Pengaturcaraan diameter, koordinat bahan kerja bagi titik permulaan program H ialah (100,50); pasang empat alatan pada pemegang alat. Alat No.1 ialah alat memusing kasar 90deg dan Alat Rujukan No. 2 ialah alat memusing halus bulatan luar 90deg. pisau, Tidak. Tidak. Pisau ke-4 ialah pisau berulir segi tiga dengan sudut 60deg (contoh dalam artikel semuanya sama).
Koordinat "alat mesin" digunakan untuk tetapan alat. Seperti yang ditunjukkan dalam rajah 1, alat rujukan "menguji secara manual memotong bulatan luar dan muka akhir bahan kerja dan merekodkan koordinat alat mesin XZ pada paparan. Koordinat alat mesin untuk asal program O diperoleh daripada hubungan antara koordinat alat mesin di titik A dan O: XO=XA – Phd, ZO=ZA. Menggunakan koordinat bahan kerja untuk H berhubung dengan titik O (100,50), akhirnya kita boleh memperoleh koordinat alat mesin untuk titik H: XH=100 – Phd, ZH=ZA+50. Sistem koordinat bahan kerja ini berdasarkan kedudukan hujung alat pada alat rujukan.
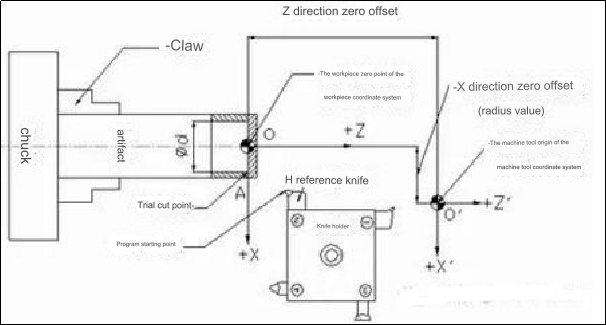
Rajah 1 Diagram skematik untuk pemotongan percubaan manual dan tetapan alat
Dalam Rajah 2, offset antara titik A dan hujung alat B berlaku disebabkan oleh perbezaan dalam sambungan dan kedudukan dalam arah X- dan Z alat yang diapit ke dalam pemegang alat. Sistem koordinat asal untuk bahan kerja tidak lagi sah. Setiap alat juga akan haus pada kadar yang berbeza semasa digunakan. Oleh itu, alat mengimbangi dan nilai haus untuk setiap alat mesti diberi pampasan.
Untuk menentukan offset alat, setiap alat mesti diselaraskan dengan titik rujukan tertentu (titik A atau B dalam Rajah 1) pada bahan kerja. CRT memaparkan koordinat alat mesin yang berbeza daripada offset alat alat bukan rujukan. Oleh itu, mereka diletakkan pada titik yang sama. Dengan menggunakan pengiraan manual atau pengiraan perisian, koordinat alat mesin ditolak daripada koordinat alat rujukan. Offset alat kemudiannya dikira untuk setiap peranti bukan standard.
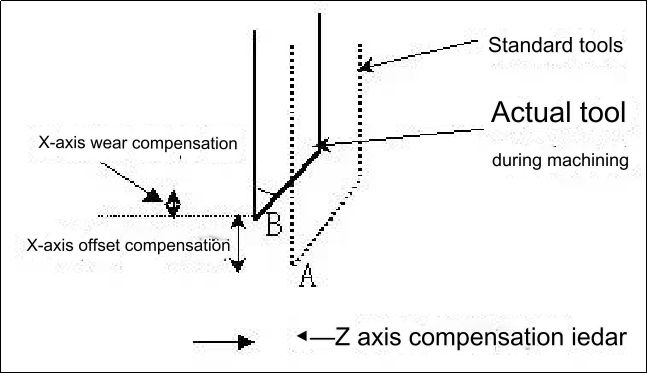
Rajah 2 Pampasan untuk alat mengimbangi dan haus
Ketepatan tetapan alat pemotong percubaan manual adalah terhad. Ini dikenali sebagai perkakas kasar. Seperti yang ditunjukkan dalam Rajah 3, untuk mencapai keputusan yang lebih tepat dalam elaun pemesinanbahagian auto cnc, program pemotongan percubaan automatik mudah boleh direka bentuk. Pisau rujukan diubah suai secara berterusan menggunakan konsep "pampasan ralat ukuran pemotongan automatik". Alat mengimbangi dan titik permulaan program alat bukan rujukan digunakan untuk memastikan bahawa perbezaan antara nilai arahan pemprosesan dan nilai diukur sebenar memenuhi keperluan ketepatan. Tetapan alat ketepatan ialah tetapan alat yang berlaku pada peringkat ini.
Ia adalah perkara biasa untuk membetulkan offset bukan standard selepas pembetulan awal. Ini kerana memastikan kedudukan titik permulaan alat rujukan adalah tepat adalah prasyarat untuk mengimbangi alat yang tepat.
Proses tetapan alat asas ini dicapai dengan menggabungkan dua peringkat ini: uji potong pisau secara manual dengan rujukan untuk mendapatkan koordinat alat mesin untuk rujukan tetapan alat. – Kira atau kira secara automatik offset alat bagi setiap alat bukan rujukan. – Pisau rujukan terletak pada anggaran permulaan program. – Pisau rujukan berulang kali memanggil program pemotongan ujian. Pemegang alat akan dialihkan dalam mod MDI atau langkah untuk mengimbangi ralat dan membetulkan kedudukan titik permulaan. Selepas mengukur saiz, pisau bukan asas akan berulang kali memanggil program pemotongan ujian. Offset alat diperbetulkan berdasarkan offset ini. Ini bermakna alat rujukan akan menjadi pegun pada permulaan program yang tepat.
Rajah 3 Gambarajah Skema Penetapan Alat untuk Pemotongan Percubaan Berbilang Pisau
Gambaran keseluruhan teknik tetapan pisau kasar
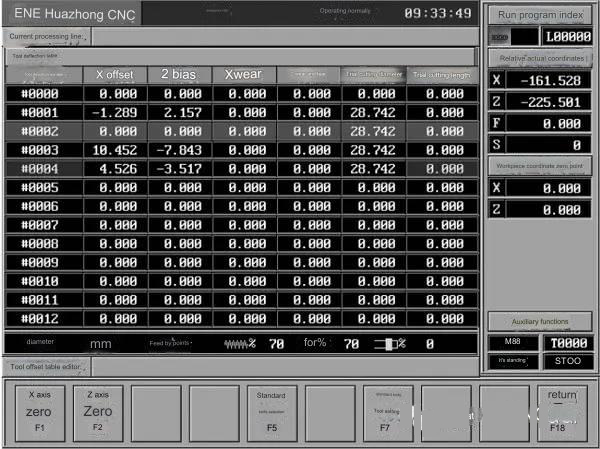
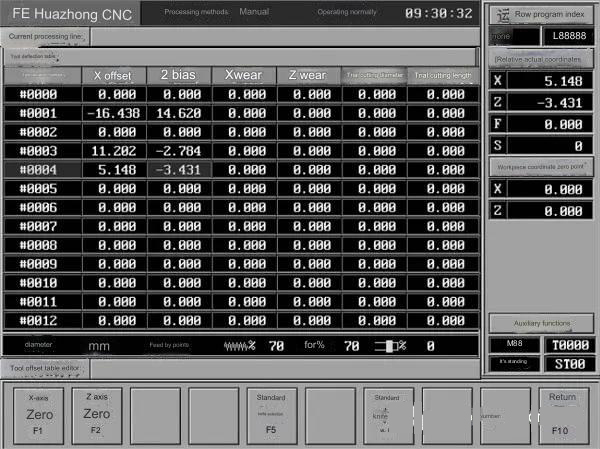
Untuk menyediakan persediaan alat, anda boleh menggunakan mana-mana kaedah berikut: tekan kekunci F2 dalam submenu sistem MDI untuk mengakses jadual ofset alat. Gunakan kekunci untuk mengalihkan bar serlahan ke kedudukan nombor alat yang sepadan dengan setiap alat dan tekan butang F5. Ubah suai nilai offset X dan Z bagi nombor offset alat #0000 dan #0001, kemudian tekan kekunci F5.
1) Tetapkan kaedah mengimbangi alat secara automatik dengan memilih alat rujukan.
Langkah-langkah untuk menetapkan alat ditunjukkan dalam Rajah 1 dan 4.
Bar biru yang diserlahkan dengan kekunci boleh dialihkan untuk menyelaraskan offset alat #0002 untuk alat rujukan No. 2. Alat rujukan 2. Untuk menetapkan No.2, tekan kekunci F5. Alat 2 akan ditetapkan sebagai alat lalai.
2) Potong bulatan luar dengan alat rujukan dan perhatikan koordinat alat mesin X. Selepas menarik balik alat, hentikan mesin dan ukur diameter luar segmen aci.
3) Bilah rujukan kembali ke titik A yang direkodkan dengan kaedah "jog+step". Masukkan PhD dan sifar dalam lajur untuk diameter pemotongan ujian dan panjang pemotongan ujian masing-masing.
4) Tarik balik alat standard dan pilih nombor alat bukan standard. Kemudian, tukar alat secara manual. Petua alat untuk setiap alatan bukan standard hendaklah diselaraskan secara visual dengan titik A menggunakan kaedah "jog+step". Laraskan offset yang sepadan selepas alat dijajarkan secara visual. Jika anda memasukkan sifar dan PhD dalam lajur untuk panjang dan diameter pemotongan percubaan, offset pisau semua pisau bukan rujukan akan dipaparkan secara automatik dalam lajur ofset X dan Z.
5) Setelah alat rujukan telah kembali ke titik A, MDI akan menjalankan “G91 G00/atau” G01 X[100 PhD] Z50 untuk sampai ke titik permulaan program.
Rajah 4 Diagram skematik alat rujukan secara automatik menetapkan offset alat untuk alat standard
2. Tetapkan koordinat alat rujukan kepada sifar pada titik rujukan tetapan alat dan secara automatik memaparkan kaedah mengimbangi alat
Seperti yang ditunjukkan dalam Rajah 1 dan Rajah 5, langkah penetapan alat adalah seperti berikut:
1) Sama seperti langkah (2) di atas.
2) Pisau rujukan kembali ke titik pemotongan percubaan A melalui kaedah "jog + step" mengikut nilai yang direkodkan.
3) Dalam antara muka yang ditunjukkan dalam Rajah 4, tekan kekunci F1 untuk "menetapkan paksi X kepada sifar" dan tekan kekunci F2 untuk "menetapkan paksi Z kepada sifar". Kemudian "koordinat sebenar relatif" yang dipaparkan oleh CRT ialah (0, 0).
4) Tukar alat bukan rujukan secara manual supaya hujung alatnya dijajarkan secara visual dengan titik A. Pada masa ini, nilai "koordinat sebenar relatif" yang dipaparkan pada CRT ialah mengimbangi alat itu berbanding dengan alat rujukan. Gunakan ▲ dan kekunci untuk menggerakkan biru Serlahkan nombor mengimbangi alat alat bukan rujukan, rekod dan masukkannya ke kedudukan yang sepadan.
5) Sama seperti langkah sebelumnya (5).
Rajah 5 Gambarajah Skema Offset Alat dipaparkan secara automatik apabila Alat Rujukan ditetapkan kepada sifar dalam koordinat titik rujukan tetapan alat.
3. Kaedah mengimbangi pisau dikira dengan mengira pemotongan percubaan secara manual dengan berbilang pisau segmen aci bulat luar.
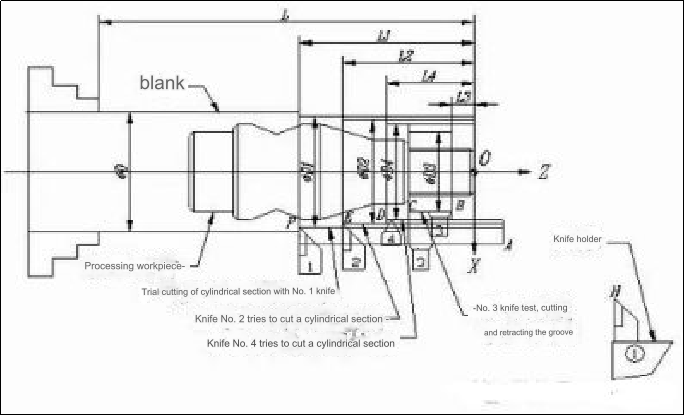
Seperti yang ditunjukkan dalam rajah 6, sistem menjajarkan pisau 1, 2 dan 4 secara manual dan memotong paksi. Ia kemudian merekodkan koordinat mesin untuk hujung pemotongan setiap pisau. (Titik F, D, dan E dalam rajah 6). Ukur diameter dan panjang bagi setiap segmen. Gantikan pisau pemotong No. 1. Seperti yang ditunjukkan dalam imej, potong ceruk alat. Jajarkan bilah pemotong dengan hujung kanan, rekodkan koordinat untuk titik B dan ukur L3 dan PhD3 seperti rajah. Hubungan koordinat tambahan antara titik F, E dan D untuk setiap alat, dan asal O boleh ditentukan dengan membandingkan data di atas.
Ia kemudiannya boleh dilihat bahawa koordinat alat mesin adalah (X2-PhD2+100 dan Z2-L2+50) dan koordinat alat mesin untuk titik permulaan program yang sepadan dengan alat rujukan. Kaedah pengiraan ditunjukkan dalam jadual 1. Di tempat kosong, masukkan nilai yang dikira dan direkodkan. Nota: Jarak pemotongan percubaan ialah jarak antara titik sifar koordinat bahan kerja dan titik akhir pemotongan percubaan dalam arah Z. Arah positif dan negatif ditentukan oleh paksi koordinat.
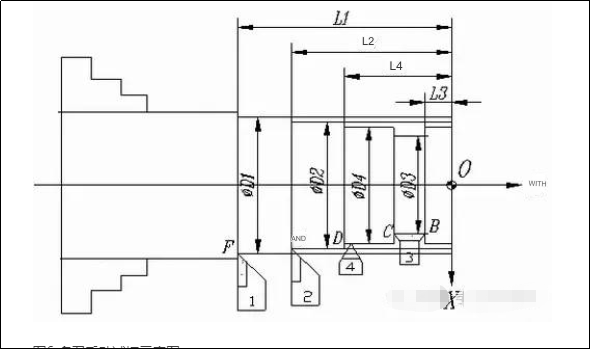
Rajah 6 Diagram skematik pemotongan percubaan manual berbilang pisau
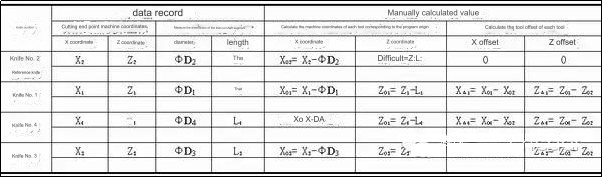
Jadual 1 Pengiraan ofset alat untuk Alat bukan standard
Kaedah ini membolehkan prosedur pemotongan ujian yang mudah, kerana ia menghilangkan keperluan untuk menyelaraskan mata pemotongan ujian secara visual. Walau bagaimanapun, pengimbangan pisau mesti dikira secara manual. Anda boleh mengira alat mengimbangi dengan cepat jika anda mencetak helaian dengan formula dan kemudian mengisi tempat kosong.
Rajah 7 Diagram skematik untuk tetapan alat automatik pada sistem CNC Century Star
Kaedah set alat automatik berbilang alat untuk sistem CNC Bintang Abad Ke-4
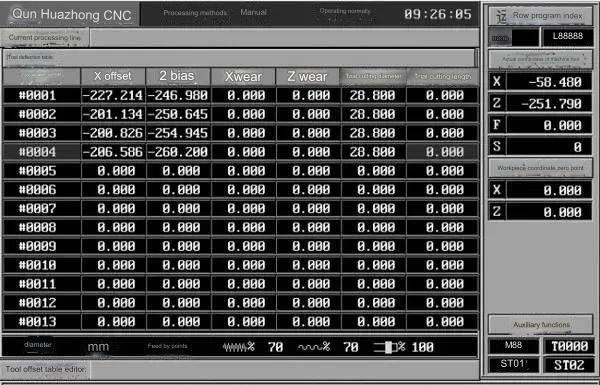
Semua kaedah yang disebutkan di atas untuk mengimbangi alat adalah kaedah relatif. Selepas kakitangan profesional melakukan penetapan parameter dan ujian sistem, HNC-21T membenarkan pengguna memilih "kaedah mengimbangi mutlak" semasa menyediakan alatan. Dalam pengaturcaraan pemesinan, mengimbangi alat mutlak adalah sedikit berbeza daripada kaedah mematikan alat relatif. Ia tidak perlu menggunakan G92 atau G54 untuk sistem koordinat bahan kerja, dan juga tidak perlu membatalkan pampasan alat. Lihat program O1005 untuk contoh. Seperti yang ditunjukkan dalam Rajah 6, selepas sistem kembali kepada sifar, biarkan setiap pisau mencuba secara manual untuk memotong bahagian silinder.
Isikan nombor mengimbangi alat untuk setiap pisau selepas mengukur panjang dan diameter. Panjang pemotongan percubaan disenaraikan dalam lajur untuk diameter pemotongan percubaan. Perisian sistem, menggunakan kaedah yang diterangkan dalam "Pemotongan Pelbagai Segmen Aci Luaran - Pengiraan Manual untuk Pisau Offset", boleh mengira secara automatik koordinat alat mesin untuk setiap pisau mengikut asal program. Kaedah penetapan alat ini adalah yang terpantas, dan ia amat sesuai untuk pengeluaran perindustrian.
Ringkasan lima teknik penetapan alatan yang tepat
Prinsip tetapan alat yang tepat ialah "pengukuran automatik, pemotongan percubaan automatik dan pampasan ralat". Pampasan ralat boleh dibahagikan kepada dua kategori: Untuk operasi MDI alat rujukan, atau tiang alat bergerak langkah untuk mengimbangi kedudukan permulaan programnya; dan untuk alat bukan standard untuk mengimbangi nilai mengimbangi atau haus alatnya. Untuk mengelakkan kekeliruan, Jadual 2 telah direka bentuk untuk mengira dan merekod nilai.
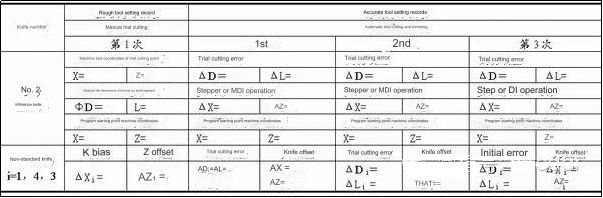
Jadual 2 Jadual Rekod Tetapan Alat untuk Kaedah Pemotongan Percubaan (Unit: mm
1. Ubah suai kaedah offset untuk setiap alat bukan piawai selepas alat rujukan telah membetulkan titik permulaan.
Langkah-langkah untuk menetapkan alat ditunjukkan dalam Rajah 3.
Selepas penentukuran alat kasar, alat rujukan hendaklah berada pada permulaan program. Masukkan offset setiap alat bukan standard dalam kedudukan jadual yang sesuai.
Gunakan program O1000 untuk memproses PhD2xL2 untuk membuat potongan percubaan.
Kemudian, ukur diameter dan panjang aci pemotong tersegmen, bandingkan dengan nilai dalam program arahan, dan tentukan ralat.
Ubah suai titik permulaan program jika nilai ralat MDI atau pergerakan langkah lebih besar daripada nilai ralat MDI.
5) Ubah suai nilai arahan O1000 secara dinamik berdasarkan dimensi yang diukur dan simpan program. Ulangi langkah (2) sehingga kedudukan permulaan alat rujukan berada dalam julat ketepatan. Perhatikan koordinat alat mesin untuk titik permulaan program yang diperbetulkan. Tetapkan koordinat pada sifar.
6) Dail O1001(pisau no. 1, No. O1002 (pisau no. 3) untuk setiap potongan percubaan, dan ukur panjang Li (i=1, 2, 3) dan diameter PhDi setiap bahagian.
7) Mengimbangi kesilapan menggunakan kaedah jadual 3.
Ulang langkah 6 hingga 7 sehingga ralat pemesinan berada dalam julat ketepatan dan alat rujukan dihentikan pada titik permulaan program dan tidak bergerak.
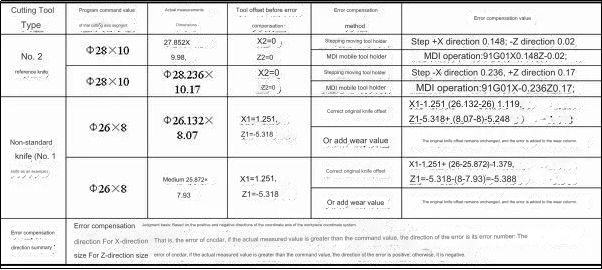
Jadual 3 Contoh pampasan ralat untuk pemotongan percubaan automatik bagi segmen aci silinder (unit: mm).
2. Mengubah suai kedudukan permulaan setiap alatan secara individu
Prinsip penetapan alat kaedah ini ialah setiap alat melaraskan titik program permulaannya, dengan itu secara tidak langsung menjajarkan dengan kedudukan asal yang sama.
Langkah-langkah untuk menetapkan alat ditunjukkan dalam Rajah 3.
Selepas penentukuran alat kasar, No. Selepas penentukuran alat kasar dan merekod offset, alat rujukan No. 2 harus berada di permulaan program.
Langkah 2) hingga (5) kaedah penetapan alat tepat pertama adalah sama.
Gunakan program O1000 untuk melakukan pemotongan percubaan. Ukur panjang Li dan diameter PhDi setiap bahagian.
Alat pergerakan langkah atau pemegang alat MDI mengimbangi ralat dan melaraskan setiap titik permulaan program.
Ulangi langkah (6) sehingga kedudukan permulaan bagi setiap alat program bukan standard berada dalam julat ketepatan yang dibenarkan.
Jadual ofset alat boleh diakses dengan memasukkan koordinat relatif yang ditunjukkan pada CRT ke dalam lajur ofset X dan Z yang sepadan dengan bilangan offset alat. Kaedah ini mudah dan ringkas. Kaedah ini mudah dan mudah.
3. Ubah suai semua kaedah offset untuk alat bukan standard pada masa yang sama selepas mengubah suai kedudukan permulaan program rujukan alat.
Kaedahnya adalah sama seperti kaedah penetapan alat yang tepat pertama. Satu-satunya perbezaan antara kedua-duanya ialah dalam langkah 7, program O1003 dipanggil, yang memanggil tiga pisau serentak (O1004 mengeluarkan No. Program O1003 menggantikan bahagian No. 2 pemprosesan alat. Langkah selebihnya adalah sama.
6. Empat pisau boleh dibaiki sekali gus menggunakan kaedah ini
Untuk mengetahui ralat pemesinan, ukur diameter setiap bahagian, PhDi, dan panjang setiap bahagian, Li (i=2, 1, 4), menggunakan kaedah alat-offset relatif. Gunakan MDI atau pergerakan berperingkat ke pemegang alat untuk alat rujukan. Ubah suai titik permulaan program. Untuk alat bukan standard, mula-mula betulkan offset menggunakan offset asal. Kemudian, masukkan offset baharu. Ralat pemesinan untuk alat rujukan juga mesti dimasukkan dalam lajur haus. Panggil program pemotongan percubaan O1005 jika offset alat mutlak digunakan untuk menentukur alat. Kemudian, beri pampasan kepada ralat pemesinan alatan dalam lajur haus nombor mengimbangi alatan masing-masing.
Apakah kesan pemilihan kaedah tetapan alat yang betul untuk pelarik CNC terhadap kualitiBahagian pemesinan CNC?
Ketepatan dan ketepatan:
Alat pemotong akan dijajarkan dengan betul jika alat ditetapkan dengan betul. Ini secara langsung memberi kesan kepada ketepatan dan ketepatan dalam operasi pemesinan. Tetapan alat yang salah boleh mengakibatkan ralat dimensi, kemasan permukaan yang buruk, dan juga sekerap.
Ketekalan:
Tetapan alat yang konsisten memastikan keseragaman operasi pemesinan dan kualiti yang konsisten dalam pelbagai bahagian. Ia mengurangkan variasi dalam kemasan dan dimensi permukaan, dan membantu mengekalkan toleransi yang ketat.
Kehidupan Alat dan Pakaian Alat:
Dengan memastikan alat disambungkan dengan betul dengan bahan kerja, tetapan alat yang betul boleh memaksimumkan hayat alat. Tetapan alat yang tidak betul boleh mengakibatkan kehausan yang berlebihan dan kerosakan alat, yang akan mengurangkan hayat alat.
Produktiviti dan Kecekapan
Teknik tetapan alat yang berkesan boleh mengurangkan masa persediaan mesin dan meningkatkan masa operasi. Ia meningkatkan produktiviti dengan meminimumkan masa terbiar dan memaksimumkan masa pemotongan. Ini membolehkan perubahan alat yang lebih cepat dan mengurangkan masa pemesinan keseluruhan.
Keselamatan Operator
Keselamatan pengendali boleh terjejas dengan memilih kaedah tetapan alat yang betul. Sesetengah kaedah seperti pengecaman imej atau pengukuran alat laser menghapuskan keperluan untuk mengendalikan alatan secara manual, mengurangkan kemungkinan kecederaan.
Matlamat Anebon adalah untuk memahami kecacatan yang sangat baik daripada pembuatan dan membekalkan sokongan teratas kepada pelanggan domestik dan luar negara dengan sepenuh hati untuk 2022 Kualiti Tinggi Aluminium Keluli Tahan Karat Ketepatan Tinggi Dibuat TersuaiCNC Turning, Pengilangan,alat ganti cncuntuk Aeroangkasa, Dalam usaha untuk mengembangkan pasaran antarabangsa kami, Anebon terutamanya membekalkan pelanggan luar negara kami bahagian mekanikal prestasi berkualiti tinggi, bahagian giling dan perkhidmatan memusing cnc.
Bahagian Jentera China dan Perkhidmatan Pemesinan CNC borong China, Anebon menjunjung semangat "inovasi, keharmonian, kerja berpasukan dan perkongsian, jejak, kemajuan pragmatik". Beri kami peluang dan kami akan membuktikan kemampuan kami. Dengan bantuan baik anda, Anebon percaya bahawa kami boleh mencipta masa depan yang cerah bersama anda.
Masa siaran: 19-Okt-2023