
Գիտե՞ք, թե քանի մեթոդ կա CNC խառատահաստոցների վրա գործիքների ճշգրիտ տեղադրման համար:
Touch Probe մեթոդ. - Այս մեթոդը օգտագործում է զոնդ, որը դիպչում է գործիքին` չափելու նրա դիրքը մեքենայի հղման կետի նկատմամբ: Այն ճշգրիտ տվյալներ է տալիս գործիքի տրամագծի և երկարության վերաբերյալ:
Գործիքի նախնական կարգավորում.Գործիքը նախադրող սարքը օգտագործվում է մեքենայից դուրս գործիքի չափերը չափելու համար: Այս մեթոդը թույլ է տալիս արագ և ճշգրիտ կարգավորել գործիքը:
Գործիքների օֆսեթ մեթոդ.– Այս մեթոդով օպերատորը չափում է գործիքի երկարությունը և տրամագիծը՝ օգտագործելով այնպիսի գործիքներ, ինչպիսիք են տրամաչափերը և միկրոմետրերը: Այնուհետև արժեքները մուտքագրվում են մեքենայի կառավարման համակարգ:
Լազերային գործիքի չափում.Լազերային համակարգերը օգտագործվում են գործիքի չափերը սահմանելու և չափելու համար: Լազերային լույսի ճառագայթ արձակելով գործիքի կտրող եզրին, նրանք ապահովում են գործիքի ճշգրիտ և արագ տվյալներ:
Պատկերի ճանաչման մեթոդ.Ընդլայնված համակարգչային համակարգերը կարող են օգտագործել պատկերների ճանաչման տեխնոլոգիա՝ գործիքի չափերը ավտոմատ հաշվարկելու համար: Նրանք դա անում են՝ լուսանկարելով գործիքը, վերլուծելով դրա առանձնահատկությունները և հետո հաշվարկելով չափումները:
Սա շատ օգտակար հոդված է: Հոդվածում նախ ներկայացվում են «փորձնական կտրող գործիքների տեղադրման մեթոդի» հիմքում ընկած սկզբունքներն ու գաղափարները, որոնք սովորաբար օգտագործվում են CNC խառատահաստոցների դեպքում: Այնուհետև այն ներկայացնում է CNC շրջադարձային համակարգերի փորձնական կտրող գործիքների կարգավորումների չորս ձեռքով մեթոդներ: Գործիքի կարգավորումների ճշգրտությունը բարելավելու համար մշակվել է ծրագրով վերահսկվող ավտոմատ փորձնական կտրման մեթոդ, որը հիմնված է «ավտոմատ կտրում-չափում-սխալների փոխհատուցման» վրա: Ամփոփվել են նաև գործիքների տեղադրման չորս ճշգրիտ մեթոդներ:
1. CNC խառատահաստոցների գործիքների տեղադրման մեթոդի սկզբունքը և գաղափարները
CNC խառատահաստոցի գործիքների տեղադրման սկզբունքները հասկանալը կարևոր է այն օպերատորների համար, ովքեր ցանկանում են հստակ պատկերացումներ ունենալ գործիքների տեղադրման, գործիքների տեղադրման գործողությունների տիրապետման և նոր մեթոդներ առաջարկելու մասին: Գործիքների կարգավորումը որոշում է աշխատանքային մասի կոորդինատների համակարգի սկզբնական դիրքը, որը փոխվում է հաստոցների կոորդինատների համակարգը ծրագրավորելիս: Գործիքների կարգավորումը ներառում է մեքենայի կոորդինատների ստացում հղման գործիքի ծրագրի մեկնարկային կետի համար և որոշում գործիքի փոխհատուցումը այդ գործիքի նկատմամբ:
Հետևյալ կոնվենցիաներն օգտագործվում են փորձնական կտրման մեթոդի միջոցով գործիքի տեղադրման հիմքում ընկած հասկացությունները և գաղափարները ցուցադրելու համար: Օգտագործեք Hua Medieval Star Teaching Turning System-ը (կիրառական ծրագրաշարի 5.30 տարբերակ); ծրագրի սկզբնավորման համար օգտագործեք աշխատանքային մասի աջ ծայրի դեմքի կենտրոնը և կարգավորեք այն G92 հրամանով: Տրամագծի ծրագրավորում, ծրագրի մեկնարկային կետի H աշխատանքային մասի կոորդինատներն են (100,50); տեղադրեք չորս գործիք գործիքների պահարանի վրա: No.1 գործիքը 90 աստիճանով կոպիտ շրջադարձային գործիք է, իսկ No. Reference գործիքը 2-ը 90 աստիճանով արտաքին շրջանակի նուրբ շրջադարձային գործիք է: դանակ, No No. 4-րդ դանակը 60 աստիճան անկյունով եռանկյուն թելերով դանակ է (հոդվածի օրինակները բոլորը նույնն են):
Գործիքների կարգավորումների համար օգտագործվում են «հաստոցային գործիք» կոորդինատները: Ինչպես ցույց է տրված նկար 1-ում, հղման գործիքը «ձեռքով կտրում է աշխատանքային մասի արտաքին շրջանակը և ծայրամասային երեսը և գրանցում XZ հաստոցների կոորդինատները էկրանին: Ծրագրի սկզբնաղբյուր O-ի հաստոցների կոորդինատները ստացվում են A և O կետերում հաստոցների կոորդինատների փոխհարաբերությունից՝ XO=XA – Phd, ZO=ZA: Օգտագործելով H-ի աշխատանքային մասի կոորդինատները O կետի նկատմամբ (100,50), մենք վերջապես կարող ենք ստանալ հաստոցների կոորդինատները H կետի համար՝ XH=100 – Phd, ZH=ZA+50: Աշխատանքային մասի կոորդինատների այս համակարգը հիմնված է գործիքի ծայրի դիրքի վրա հղման գործիքի վրա:
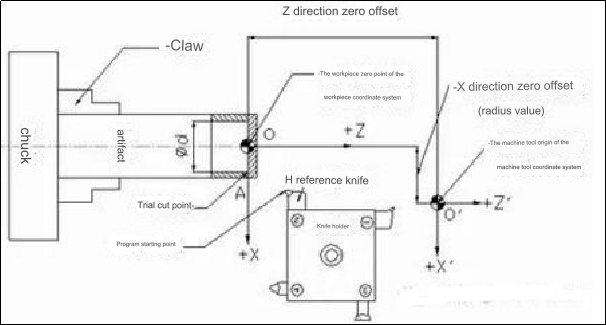
Նկար 1 Ձեռքով փորձնական կտրման և գործիքի կարգավորումների սխեմատիկ դիագրամ
Նկար 2-ում A կետի և գործիքի ծայրի B-ի միջև շեղումը տեղի է ունենում գործիքակալի մեջ սեղմված գործիքների ընդլայնումների և դիրքերի տարբերությունների պատճառով: Աշխատանքային մասի բնօրինակ կոորդինատային համակարգը այլևս վավեր չէ: Օգտագործման ընթացքում յուրաքանչյուր գործիք նույնպես մաշվում է տարբեր արագությամբ: Հետևաբար, յուրաքանչյուր գործիքի համար գործիքի շեղումները և մաշվածության արժեքները պետք է փոխհատուցվեն:
Գործիքի օֆսեթը որոշելու համար յուրաքանչյուր գործիք պետք է համապատասխանեցվի աշխատանքային մասի որոշակի հղման կետին (Նկար 1-ում A կամ B կետը): CRT-ն ցուցադրում է հաստոցների կոորդինատները, որոնք տարբերվում են ոչ տեղեկատու գործիքների գործիքների շեղումից: Հետևաբար, դրանք տեղակայված են նույն կետում: Օգտագործելով ձեռքով հաշվարկներ կամ ծրագրային հաշվարկներ, հաստոցային գործիքի կոորդինատները հանվում են հղման գործիքի կոորդինատներից: Այնուհետև յուրաքանչյուր ոչ ստանդարտ սարքի համար հաշվարկվում է գործիքի օֆսեթը:
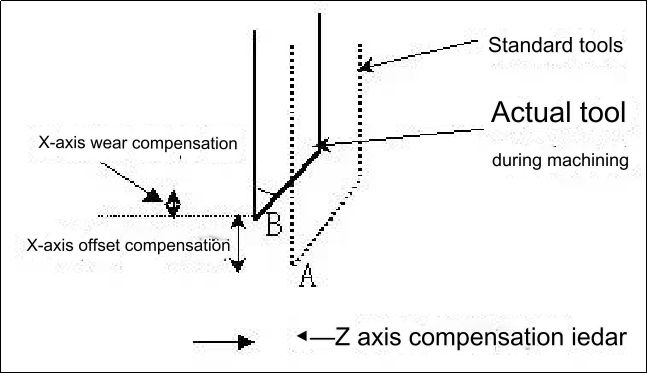
Նկար 2 Գործիքի փոխհատուցում և մաշվածություն
Ձեռքով փորձնական կտրող գործիքի կարգավորումների ճշգրտությունը սահմանափակ է: Սա հայտնի է որպես կոպիտ գործիքավորում: Ինչպես ցույց է տրված Գծապատկեր 3-ում, ավելի ճշգրիտ արդյունքների հասնելու համար մեքենաշինական թույլտվությունների շրջանակներումcnc ավտոմաս, կարող է նախագծվել պարզ ավտոմատացված փորձնական կտրման ծրագիր: Հղման դանակը շարունակաբար փոփոխվում է՝ օգտագործելով «ավտոմատ կտրում-չափում-սխալների փոխհատուցում» հասկացությունը: Գործիքի օֆսեթը և ոչ հղման գործիքի ծրագրի մեկնարկային կետը օգտագործվում են համոզվելու համար, որ մշակման հրահանգի արժեքի և իրական չափված արժեքի տարբերությունը համապատասխանում է ճշտության պահանջներին: Գործիքների ճշգրիտ կարգավորումը գործիքի կարգավորումն է, որը տեղի է ունենում այս փուլում:
Սովորական է շտկել ոչ ստանդարտ հաշվանցումները սկզբնական ուղղումից հետո: Դա պայմանավորված է նրանով, որ հղման գործիքի մեկնարկային կետի դիրքի ճշգրիտ լինելու ապահովումը գործիքի ճշգրիտ հաշվանցումների նախապայման է:
Գործիքների տեղադրման այս հիմնական գործընթացը ձեռք է բերվում այս երկու փուլերի համատեղմամբ. ձեռքով փորձարկել դանակը հղման հետ, որպեսզի ձեռք բերեք հաստոցային գործիքի կոորդինատները գործիքի կարգավորումների տեղեկանքի համար: - Հաշվեք կամ ինքնաբերաբար հաշվարկեք յուրաքանչյուր ոչ հղման գործիքի գործիքների փոխհատուցումները: – Հղման դանակը գտնվում է ծրագրի մոտավոր սկզբում: – Հղման դանակը բազմիցս կանչում է փորձնական կտրման ծրագիրը: Գործիքակալը կտեղափոխվի MDI կամ քայլ ռեժիմով՝ սխալները փոխհատուցելու և մեկնարկային կետի դիրքը շտկելու համար: Չափը չափելուց հետո ոչ հիմնական դանակը բազմիցս կկանչի թեստային կտրման ծրագիր: Գործիքի օֆսեթը ուղղվում է այս օֆսեթի հիման վրա: Սա նշանակում է, որ հղման գործիքը անշարժ կլինի ծրագրի հենց սկզբում:
Գծապատկեր 3 Գործիքի պարամետրի սխեմատիկ դիագրամ բազմաբնույթ դանակով փորձնական կտրման համար
Դանակի կոպիտ տեղադրման տեխնիկայի ակնարկ
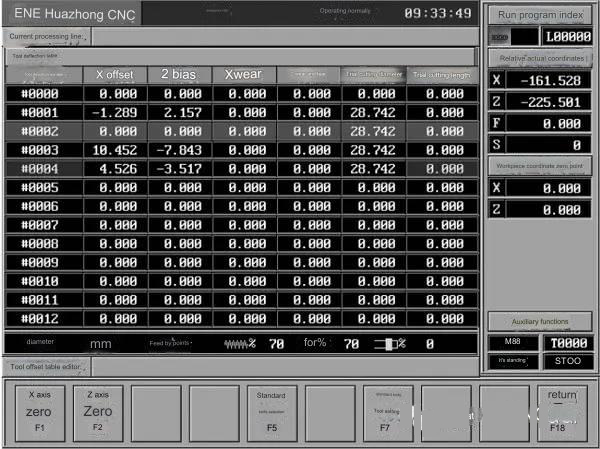
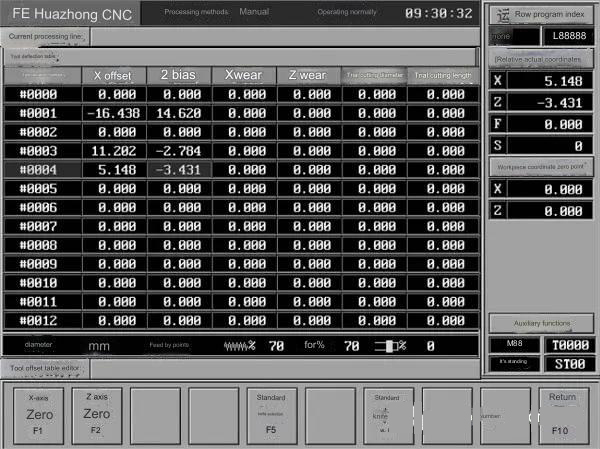
Գործիքների տեղադրմանը պատրաստվելու համար կարող եք օգտագործել հետևյալ մեթոդներից որևէ մեկը. սեղմեք F2 ստեղնը համակարգի MDI-ի ենթամենյուում՝ գործիքի օֆսեթ աղյուսակը մուտք գործելու համար: Օգտագործեք ստեղները՝ ընդգծված սանդղակը յուրաքանչյուր գործիքին համապատասխանող գործիքի համարի դիրք տեղափոխելու համար և սեղմեք F5 կոճակը: Փոփոխեք #0000 և #0001 գործիքների օֆսեթ թվերի X և Z օֆսեթ արժեքները, այնուհետև սեղմեք F5 ստեղնը:
1) Ավտոմատ կերպով սահմանել գործիքի օֆսեթ մեթոդը՝ ընտրելով հղման գործիքը:
Գործիքը կարգավորելու քայլերը ներկայացված են Նկար 1-ում և 4-ում:
Ստեղների հետ ընդգծված կապույտ տողը կարող է տեղափոխվել թիվ 2 հղման գործիքի համար գործիքի օֆսեթ #0002 հավասարեցնելու համար: Հղման գործիք 2. No.2-ը սահմանելու համար սեղմեք F5 ստեղնը: 2 գործիքը կսահմանվի որպես լռելյայն գործիք:
2) Կտրեք արտաքին շրջանակը հղման գործիքով և նշեք X հաստոցային կոորդինատները: Գործիքը քաշելուց հետո կանգնեցրեք մեքենան և չափեք լիսեռի հատվածի արտաքին տրամագիծը:
3) Հղման սայրը վերադառնում է «վազք+քայլ» մեթոդով գրանցված Ա կետին: Մուտքագրեք PhD և զրո սյունակներում՝ համապատասխանաբար թեստի կտրման տրամագծի և թեստի կտրման երկարության համար:
4) Հետ քաշեք ստանդարտ գործիքը և ընտրեք ոչ ստանդարտ գործիքի համարը: Այնուհետև ձեռքով փոխեք գործիքը: Յուրաքանչյուր ոչ ստանդարտ գործիքի գործիքի ծայրը պետք է տեսողականորեն համապատասխանեցվի Ա կետին՝ օգտագործելով «վազք+քայլ» մեթոդը: Գործիքը տեսողականորեն հավասարեցվելուց հետո կարգավորեք համապատասխան օֆսեթը: Եթե փորձնական կտրվածքի երկարության և տրամագծի համար սյունակներում մուտքագրեք զրո և PhD, ապա բոլոր ոչ տեղեկատու դանակների դանակների շեղումները ավտոմատ կերպով կցուցադրվեն X օֆսեթ և Z օֆսեթ սյունակում:
5) Երբ հղման գործիքը վերադառնա A կետ, MDI-ն կաշխատի «G91 G00/կամ» G01 X[100 PhD] Z50՝ ծրագրի մեկնարկային կետին հասնելու համար:
Նկար 4 Հղման գործիքի սխեմատիկ դիագրամը ավտոմատ կերպով սահմանում է գործիքի օֆսեթը ստանդարտ գործիքի համար
2. Հղման գործիքի կոորդինատները գործիքի սահմանման հղման կետում սահմանեք զրոյի և ավտոմատ կերպով ցուցադրեք գործիքի օֆսեթ մեթոդը
Ինչպես ցույց է տրված Նկար 1-ում և Նկար 5-ում, գործիքի կարգավորման քայլերը հետևյալն են.
1) Նույնը, ինչ վերը նշված քայլը (2):
2) Հենակետային դանակը վերադառնում է փորձնական կտրող կետ A «վազք + քայլ» մեթոդով` ըստ գրանցված արժեքի:
3) Նկար 4-ում ներկայացված ինտերֆեյսում սեղմեք F1 ստեղնը՝ «X առանցքը զրոյի դնելու» համար և սեղմեք F2 ստեղնը՝ «Z առանցքը զրոյի դնելու համար»: Այնուհետև CRT-ի կողմից ցուցադրվող «հարաբերական փաստացի կոորդինատներն» են (0, 0):
4) Ձեռքով փոխեք ոչ հղման գործիքը, որպեսզի դրա գործիքի ծայրը տեսողականորեն համընկնի A կետի հետ: Այս պահին CRT-ի վրա ցուցադրվող «հարաբերական փաստացի կոորդինատների» արժեքը գործիքի գործիքի շեղումն է հղման գործիքի նկատմամբ: Օգտագործեք ▲ և ստեղները՝ կապույտը տեղափոխելու համար Նշեք ոչ հղումային գործիքի գործիքի օֆսեթ համարը, ձայնագրեք այն և մուտքագրեք այն համապատասխան դիրքում:
5) Նույնը, ինչ նախորդ քայլը (5):
Նկար 5 Գործիքների օֆսեթի սխեմատիկ դիագրամը ինքնաբերաբար ցուցադրվում է, երբ Reference Tool-ը զրոյի է սահմանվում գործիքի կարգավորումների հղման կետերի կոորդինատներում:
3. Դանակի օֆսեթ մեթոդը հաշվարկվում է` ձեռքով հաշվարկելով փորձնական կտրումը արտաքին շրջանաձև լիսեռի հատվածի բազմաթիվ դանակներով:
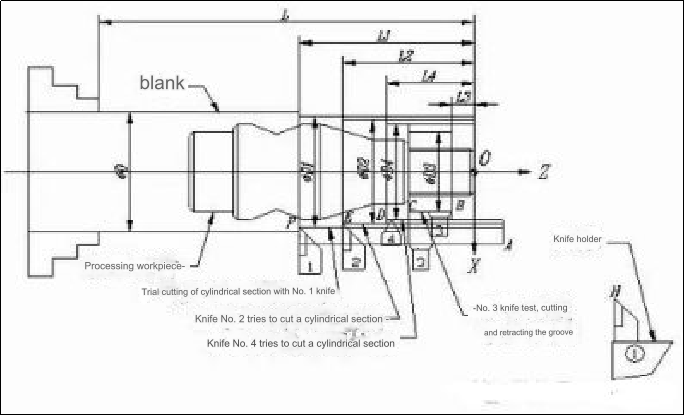
Ինչպես ցույց է տրված նկար 6-ում, համակարգը ձեռքով հավասարեցնում է 1, 2 և 4 դանակները և կտրում առանցքը: Այնուհետև այն գրանցում է մեքենայի կոորդինատները յուրաքանչյուր դանակի կտրող ծայրերի համար: (F, D և E կետերը նկար 6-ում): Չափել տրամագիծը և երկարությունը յուրաքանչյուր հատվածի համար: Փոխարինեք թիվ 1 կտրող դանակը: Ինչպես ցույց է տրված նկարում, կտրեք գործիքի խորշը: Հավասարեցրեք կտրող սայրը աջ ծայրով, գրանցեք B կետի կոորդինատները և չափեք L3 և PhD3 ըստ նկարի: Յուրաքանչյուր գործիքի համար F, E և D կետերի միջև աճող կոորդինատային կապը և O սկզբնաղբյուրը կարելի է որոշել՝ համեմատելով վերը նշված տվյալները:
Այնուհետև երևում է, որ հաստոցների կոորդինատներն են (X2-PhD2+100 և Z2-L2+50) և հաստոցների կոորդինատները ծրագրի մեկնարկային կետի համար, որը համապատասխանում է հղման գործիքին: Հաշվարկի եղանակը ներկայացված է աղյուսակ 1-ում: Դատարկ տեղերում մուտքագրեք հաշվարկված և գրանցված արժեքները: Նշում. Փորձնական կտրման հեռավորությունը աշխատանքային մասի կոորդինատային զրոյական կետի և Z- ուղղությամբ փորձնական կտրվածքի վերջնակետի միջև հեռավորությունն է: Դրական և բացասական ուղղությունները որոշվում են կոորդինատային առանցքով:
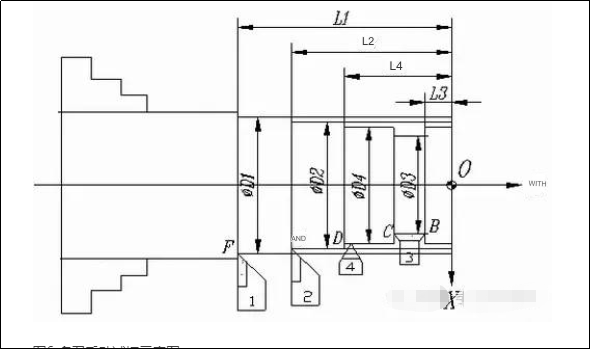
Նկար 6 Բազմադանակով ձեռքով փորձնական կտրման սխեմատիկ դիագրամ
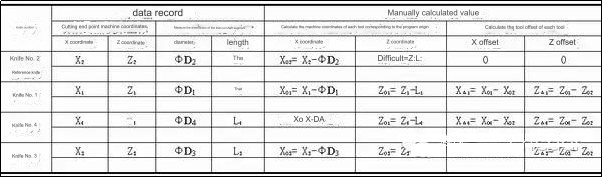
Աղյուսակ 1 Ոչ ստանդարտ Գործիքների համար գործիքների հաշվանցումների հաշվարկ
Այս մեթոդը թույլ է տալիս պարզ փորձնական կտրման ընթացակարգ, քանի որ այն վերացնում է փորձնական կտրման կետերը տեսողականորեն հավասարեցնելու անհրաժեշտությունը: Այնուամենայնիվ, դանակի օֆսեթը պետք է հաշվարկվի ձեռքով: Դուք կարող եք արագ հաշվարկել գործիքի օֆսեթը, եթե թերթը տպեք բանաձևով և այնուհետև լրացնեք բացերը:
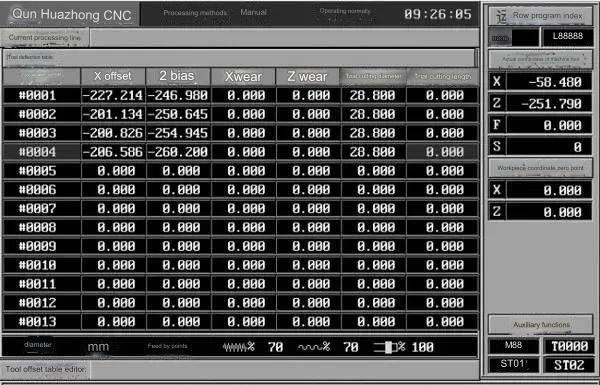
Նկար 7 Century Star CNC համակարգում գործիքի ավտոմատ տեղադրման սխեմատիկ դիագրամ
Բազմագործիքների ավտոմատ գործիքների հավաքածուի մեթոդ 4th Century Star CNC համակարգի համար
Գործիքների փոխհատուցման վերը նշված բոլոր մեթոդները հարաբերական մեթոդներ են: Պրոֆեսիոնալ անձնակազմը կատարել է պարամետրերի կարգավորում և համակարգի փորձարկում, HNC-21T-ը թույլ է տալիս օգտատերերին ընտրել «բացարձակ օֆսեթ մեթոդը» գործիքները կարգավորելիս: Հաստոցների ծրագրավորման մեջ գործիքի բացարձակ օֆսեթը մի փոքր տարբերվում է գործիքի անջատման հարաբերական մեթոդից: Անհրաժեշտ չէ օգտագործել G92 կամ G54 աշխատանքային մասի կոորդինատային համակարգերի համար, ինչպես նաև անհրաժեշտ չէ չեղարկել գործիքի փոխհատուցումը: Օրինակի համար տե՛ս O1005 ծրագիրը: Ինչպես ցույց է տրված Նկար 6-ում, այն բանից հետո, երբ համակարգը վերադառնում է զրոյի, թող յուրաքանչյուր դանակ փորձի ձեռքով կտրել գլանների հատվածը:
Լրացրեք գործիքի օֆսեթ թվերը յուրաքանչյուր դանակի երկարությունը և տրամագիծը չափելուց հետո: Փորձնական կտրման երկարությունը նշված է փորձնական կտրման տրամագծի սյունակում: Համակարգային ծրագրաշարը, օգտագործելով «Multikdife Cutting of External Shaft Segment – Manual Calculation for Dnife Offset» -ում նկարագրված մեթոդը, կարող է ավտոմատ կերպով հաշվարկել յուրաքանչյուր դանակի հաստոցների կոորդինատները՝ ըստ ծրագրի ծագման: Գործիքների տեղադրման այս մեթոդը ամենաարագն է, և այն հատկապես հարմար է արդյունաբերական արտադրության համար:
Գործիքների տեղադրման հինգ ճշգրիտ տեխնիկայի ամփոփում
Գործիքների ճշգրիտ տեղադրման սկզբունքն է «ավտոմատ չափում, ավտոմատ փորձնական կտրում և սխալի փոխհատուցում»: Սխալների փոխհատուցումը կարելի է բաժանել երկու կատեգորիայի. Հղման գործիքի MDI գործողության համար կամ քայլով շարժվող գործիքի սյունակները՝ ծրագրի մեկնարկային դիրքը փոխհատուցելու համար; և ոչ ստանդարտ գործիքի համար՝ փոխհատուցելու իր գործիքի փոխհատուցման կամ մաշվածության արժեքները: Շփոթությունից խուսափելու համար Աղյուսակ 2-ը մշակվել է արժեքները հաշվարկելու և գրանցելու համար:
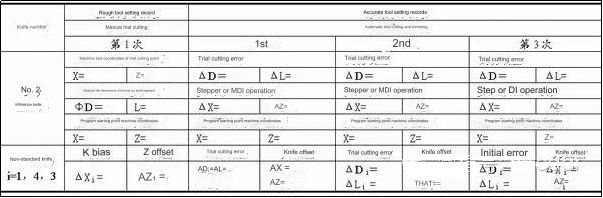
Աղյուսակ 2 Փորձնական կտրման մեթոդի համար գործիքի կարգավորումների աղյուսակ (միավոր՝ մմ
1. Փոփոխեք օֆսեթ մեթոդը յուրաքանչյուր ոչ ստանդարտ գործիքի համար այն բանից հետո, երբ հղման գործիքը շտկեց մեկնարկային կետը:
Գործիքը կարգավորելու քայլերը ներկայացված են Նկար 3-ում:
Գործիքների կոպիտ չափաբերումից հետո հղման գործիքը պետք է լինի ծրագրի սկզբում: Մուտքագրեք յուրաքանչյուր ոչ ստանդարտ գործիքի օֆսեթը աղյուսակի համապատասխան դիրքում:
Օգտագործեք O1000 ծրագիրը PhD2xL2-ը մշակելու համար՝ փորձնական կտրվածք կատարելու համար:
Այնուհետև չափեք հատվածավոր կտրող լիսեռի տրամագիծը և երկարությունը, համեմատեք դրանք հրամանի ծրագրի արժեքի հետ և որոշեք սխալը:
Փոփոխեք ծրագրի մեկնարկային կետը, եթե MDI սխալի արժեքը կամ քայլի շարժումը ավելի մեծ է, քան MDI սխալի արժեքը:
5) Դինամիկ կերպով փոփոխեք O1000 հրամանի արժեքը՝ հիմնվելով չափված չափերի վրա և պահպանեք ծրագիրը: Կրկնեք քայլերը (2), մինչև հղման գործիքի մեկնարկային դիրքը լինի ճշգրտության միջակայքում: Ուշադրություն դարձրեք շտկված ծրագրի մեկնարկային կետի հաստոցային կոորդինատներին: Սահմանեք կոորդինատները զրոյի վրա:
6) Յուրաքանչյուր փորձնական կտրվածքի համար հավաքեք O1001 (դանակ թիվ 1, No. O1002 (դանակ թիվ 3) և չափեք յուրաքանչյուր հատվածի Li երկարությունը (i=1, 2, 3) և PhDi տրամագիծը:
7) փոխհատուցել սխալները՝ օգտագործելով աղյուսակ 3 մեթոդը:
Կրկնեք 6-ից 7-րդ քայլերը, մինչև մշակման սխալները լինեն ճշգրտության սահմաններում, և հղման գործիքը դադարեցվի ծրագրի սկզբնական կետում և չշարժվի:
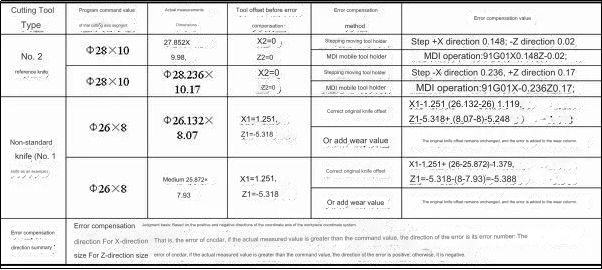
Աղյուսակ 3 Սխալների փոխհատուցման օրինակ գլանաձև լիսեռի հատվածների ավտոմատ փորձնական կտրման համար (միավոր՝ մմ):
2. Յուրաքանչյուր գործիքի մեկնարկային դիրքի փոփոխություն առանձին-առանձին
Այս մեթոդի գործիքակազմավորման սկզբունքն այն է, որ յուրաքանչյուր գործիք հարմարեցնում է իր մեկնարկային ծրագրային կետը, այդպիսով անուղղակիորեն համընկնում է նույն սկզբնակետի հետ:
Գործիքը կարգավորելու քայլերը ներկայացված են Նկար 3-ում:
Գործիքների կոպիտ չափաբերումից հետո No. Գործիքների կոպիտ չափաբերումից և հաշվանցումները գրանցելուց հետո թիվ 2 հղման գործիքը պետք է լինի ծրագրի սկզբում:
Գործիքների տեղադրման առաջին ճշգրիտ մեթոդի 2)-ից մինչև (5) քայլերը նույնական են:
Փորձնական կտրում կատարելու համար օգտագործեք O1000 ծրագիրը: Չափեք յուրաքանչյուր հատվածի Li երկարությունը և PhDi տրամագիծը:
Քայլ շարժման գործիքը կամ MDI գործիքի կրիչը փոխհատուցում է սխալները և կարգավորում յուրաքանչյուր գործիքի ծրագրի մեկնարկային կետը:
Կրկնեք քայլերը (6), մինչև ծրագրի յուրաքանչյուր ոչ ստանդարտ գործիքի մեկնարկային դիրքը լինի թույլատրելի ճշգրտության սահմաններում:
Գործիքների օֆսեթ աղյուսակը կարելի է մուտք գործել՝ մուտքագրելով CRT-ի վրա ցուցադրված հարաբերական կոորդինատները X օֆսեթ և Z օֆսեթ սյունակում, որը համապատասխանում է գործիքի օֆսեթի թվին: Այս մեթոդը հարմար է և պարզ: Այս մեթոդը պարզ է և հարմար։
3. Փոփոխեք ոչ ստանդարտ գործիքների բոլոր օֆսեթ մեթոդները գործիքի հղման ծրագրի մեկնարկային դիրքը փոխելուց հետո նույն պահին:
Մեթոդը նույնն է, ինչ առաջին ճշգրիտ գործիքակազմավորման մեթոդը: Երկուսի միջև միակ տարբերությունն այն է, որ 7-րդ քայլում կանչվում է O1003 ծրագիրը, որը միաժամանակ կանչում է երեք դանակ (O1004-ը հեռացնում է No. O1003 ծրագիրը փոխարինում է գործիքի մշակման թիվ 2 բաժինը: Մնացած քայլերը նույնական են:
6. Այս մեթոդով կարելի է միանգամից վերանորոգել չորս դանակ
Մշակման սխալը պարզելու համար չափեք յուրաքանչյուր հատվածի տրամագիծը՝ PhDi, և յուրաքանչյուր հատվածի երկարությունը՝ Li (i=2, 1, 4), օգտագործելով հարաբերական գործիք-օֆսեթ մեթոդը։ Հղման գործիքի համար օգտագործեք MDI կամ քայլ առ քայլ շարժում դեպի գործիքակալը: Փոփոխեք ծրագրի մեկնարկի կետը: Ոչ ստանդարտ գործիքների համար նախ շտկեք օֆսեթը՝ օգտագործելով սկզբնական օֆսեթը: Այնուհետև մուտքագրեք նոր օֆսեթը: Հղման գործիքի մշակման սխալը նույնպես պետք է մուտքագրվի մաշվածության սյունակում: Զանգահարեք O1005 փորձնական կտրման ծրագիր, եթե գործիքի բացարձակ շեղումն օգտագործվում է գործիքը չափաբերելու համար: Այնուհետև, փոխհատուցեք գործիքների մեքենայական սխալները իրենց համապատասխան գործիքի օֆսեթ թվերի մաշվածության սյունակներում:
Ի՞նչ ազդեցություն ունի CNC խառատահաստոցների ճիշտ գործիքի տեղադրման մեթոդի ընտրությունը որակի վրաCNC հաստոցների մասեր?
Ճշգրտություն և ճշգրտություն.
Կտրող գործիքները ճիշտ կհավասարեցվեն, եթե գործիքը ճիշտ տեղադրվի: Սա ուղղակիորեն ազդում է հաստոցների աշխատանքի ճշգրտության և ճշգրտության վրա: Գործիքի սխալ կարգավորումը կարող է հանգեցնել չափերի սխալների, մակերեսների վատ հարդարման և նույնիսկ ջարդոնի:
Հետևողականություն:
Գործիքների հետևողական կարգավորումները ապահովում են մշակման գործողությունների միատեսակությունը և մի քանի մասերի կայուն որակը: Այն նվազեցնում է մակերեսի հարդարման և չափսերի տատանումները և օգնում է պահպանել ամուր հանդուրժողականություն:
Tool Life and Toolwear.
Ապահովելով, որ գործիքը պատշաճ կերպով միացված է աշխատանքային մասի հետ, գործիքի ճիշտ կարգավորումը կարող է առավելագույնի հասցնել գործիքի կյանքը: Գործիքների ոչ պատշաճ կարգավորումները կարող են հանգեցնել գործիքների չափազանց մաշվածության և կոտրվելու, ինչը կնվազեցնի գործիքի կյանքը:
Արտադրողականություն և արդյունավետություն
Գործիքների տեղադրման արդյունավետ մեթոդները կարող են նվազեցնել մեքենայի տեղադրման ժամանակը և մեծացնել շահագործման ժամանակը: Այն մեծացնում է արտադրողականությունը՝ նվազագույնի հասցնելով պարապուրդի ժամանակը և առավելագույնի հասցնելով կտրման ժամանակը: Սա թույլ է տալիս ավելի արագ փոխել գործիքները և կրճատել մշակման ընդհանուր ժամանակը:
Օպերատորի անվտանգություն
Օպերատորի անվտանգության վրա կարող է ազդել գործիքի տեղադրման ճիշտ մեթոդ ընտրելը: Որոշ մեթոդներ, ինչպիսիք են պատկերի ճանաչումը կամ լազերային գործիքի չափումը, վերացնում են գործիքները ձեռքով աշխատելու անհրաժեշտությունը՝ նվազեցնելով վնասվածքի հավանականությունը:
Anebon-ի նպատակն է հասկանալ արտադրության գերազանց այլանդակությունը և 2022 թվականի բարձրորակ չժանգոտվող պողպատից պատրաստված ալյումինե բարձր ճշգրտությամբ պատրաստված լավագույն աջակցությունը ներքին և արտասահմանյան հաճախորդներին ամբողջ սրտով ապահովելու համար:CNC շրջադարձ, ֆրեզերային,cnc պահեստամասերAerospace-ի համար Մեր միջազգային շուկան ընդլայնելու նպատակով Anebon-ը հիմնականում մատակարարում է մեր արտասահմանյան հաճախորդներին բարձրորակ կատարողականի մեխանիկական մասեր, աղացած մասեր և cnc շրջադարձային ծառայություն:
Չինաստանի մեծածախ Չինաստանի մեքենաների մասեր և CNC հաստոցների ծառայություն, Anebon-ը պահպանում է «նորարարության, ներդաշնակության, թիմային աշխատանքի և փոխանակման, արահետներ, պրագմատիկ առաջընթացի ոգին»: Տվեք մեզ հնարավորություն, և մենք ապացուցելու ենք մեր կարողությունները: Ձեր բարի օգնությամբ Անեբոն հավատում է, որ մենք միասին կարող ենք ձեզ հետ ստեղծել պայծառ ապագա:
Հրապարակման ժամանակը՝ հոկտ-19-2023