
CNC મશીન ટૂલ સાધનોની કાર્યક્ષમતા તેની ચોકસાઈ સાથે ગાઢ રીતે જોડાયેલી છે, જે આવા સાધનોની ખરીદી અથવા વિકાસ કરતી વખતે કંપનીઓ માટે તેને મુખ્ય પ્રાથમિકતા બનાવે છે. જો કે, મોટા ભાગના નવા મશીન ટૂલ્સની ચોકસાઈ ઘણીવાર ફેક્ટરી છોડવા પર જરૂરી ધોરણોથી ઓછી હોય છે. વધુમાં, લાંબા સમય સુધી ઉપયોગ દરમિયાન મિકેનિકલ રનિંગ-ઇન અને પહેરવાની ઘટના શ્રેષ્ઠ ઉત્પાદન કામગીરીની ખાતરી કરવા માટે CNC મશીન ટૂલ્સની ચોકસાઈને સમાયોજિત કરવાની મહત્વપૂર્ણ જરૂરિયાત પર ભાર મૂકે છે.
1. બેકલેશ વળતર
CNC મશીન ટૂલ્સમાં બેકલેશને હળવું કરવું, દરેક સંકલન ધરીની ફીડ ટ્રાન્સમિશન ચેઇન પર ડ્રાઇવિંગ ઘટકોના રિવર્સ ડેડ ઝોનમાંથી ઉદ્દભવતી ભૂલો અને દરેક યાંત્રિક ગતિ ટ્રાન્સમિશન જોડીનું રિવર્સ ક્લિયરન્સ વિચલનો તરફ દોરી જાય છે કારણ કે પ્રત્યેક સંકલન અક્ષ આગળથી રિવર્સ ગતિમાં સંક્રમણ કરે છે. આ વિચલન, જેને રિવર્સ ક્લિયરન્સ અથવા લોસ્ટ મોમેન્ટમ તરીકે પણ ઓળખવામાં આવે છે, જ્યારે સેમી-ક્લોઝ્ડ-લૂપ સર્વો સિસ્ટમનો ઉપયોગ કરવામાં આવે ત્યારે મશીન ટૂલની સ્થિતિની ચોકસાઈ અને પુનરાવર્તિત સ્થિતિની ચોકસાઈને નોંધપાત્ર રીતે અસર કરી શકે છે. વધુમાં, સમય જતાં વસ્ત્રોને કારણે કાઇનેમેટિક જોડી ક્લિયરન્સમાં ક્રમશઃ વધારો વિપરીત વિચલનમાં અનુરૂપ વધારો તરફ દોરી જાય છે. તેથી, મશીન ટૂલના દરેક સંકલન અક્ષના વિપરીત વિચલન માટે નિયમિત માપન અને વળતર આવશ્યક છે.

બેકલેશ માપવા
વિપરીત વિચલનનું મૂલ્યાંકન કરવા માટે, સંકલન અક્ષની મુસાફરી શ્રેણીમાં પ્રારંભ કરો. સૌપ્રથમ, આગળ અથવા વિપરીત દિશામાં નિર્ધારિત અંતરને ખસેડીને સંદર્ભ બિંદુ સ્થાપિત કરો. આ પછી, ચોક્કસ અંતરને આવરી લેવા માટે તે જ દિશામાં ચોક્કસ હલનચલન આદેશ જારી કરો. આગળ, સમાન અંતરને વિરુદ્ધ દિશામાં ખસેડવા માટે આગળ વધો અને સંદર્ભ અને સ્ટોપ પોઝિશન વચ્ચેનો તફાવત નક્કી કરો. સામાન્ય રીતે, બહુવિધ માપન (ઘણી વખત સાત) મધ્યબિંદુની નજીકના ત્રણ સ્થાનો અને મુસાફરી શ્રેણીના બંને અંતિમો પર કરવામાં આવે છે. પછી દરેક સ્થાન પર સરેરાશ મૂલ્યની ગણતરી કરવામાં આવે છે, આ સરેરાશ વચ્ચેની મહત્તમ કિંમત વિપરીત વિચલન માટે માપ તરીકે ઉપયોગમાં લેવાય છે. વિપરીત વિચલન મૂલ્યને ચોક્કસ રીતે નિર્ધારિત કરવા માટે માપ દરમિયાન ચોક્કસ અંતર ખસેડવું આવશ્યક છે.

રેખીય ગતિ અક્ષના વિપરીત વિચલનનું મૂલ્યાંકન કરતી વખતે, માપન સાધન તરીકે ડાયલ સૂચક અથવા ડાયલ ગેજનો ઉપયોગ કરવો સામાન્ય છે. જો સંજોગો પરવાનગી આપે છે, તો આ હેતુ માટે દ્વિ-આવર્તન લેસર ઇન્ટરફેરોમીટરનો પણ ઉપયોગ કરી શકાય છે. માપન માટે ડાયલ ઈન્ડિકેટરનો ઉપયોગ કરતી વખતે, તે સુનિશ્ચિત કરવું આવશ્યક છે કે મીટરનો આધાર અને સ્ટેમ વધુ પડતો વિસ્તરે નહીં, કારણ કે માપન દરમિયાન લાંબી કેન્ટિલિવર મીટરના આધારને બળને કારણે ખસેડી શકે છે, જે અચોક્કસ રીડિંગ્સ અને અવાસ્તવિક વળતર મૂલ્યો તરફ દોરી જાય છે.
માપન માટે પ્રોગ્રામિંગ પદ્ધતિનો અમલ કરવાથી પ્રક્રિયાની સગવડતા અને ચોકસાઈમાં વધારો થઈ શકે છે. ઉદાહરણ તરીકે, ત્રણ-સંકલન વર્ટિકલ મશીન ટૂલ પર X-અક્ષના વિપરીત વિચલનનું મૂલ્યાંકન કરવા માટે, પ્રક્રિયા સ્પિન્ડલની નળાકાર સપાટી સામે મીટરને દબાવીને શરૂ થઈ શકે છે, ત્યારબાદ માપન માટે નિયુક્ત પ્રોગ્રામ ચલાવીને.
N10G91G01X50F1000; વર્કબેન્ચને જમણી તરફ ખસેડો
N20X-50;ટ્રાન્સમિશન ગેપને દૂર કરવા માટે વર્કટેબલ ડાબી તરફ ખસે છે
N30G04X5; અવલોકન માટે થોભો
N40Z50; Z-અક્ષ ઉભો થયો અને માર્ગની બહાર
N50X-50: વર્કબેન્ચ ડાબી તરફ ખસે છે
N60X50: વર્કબેન્ચ જમણે ખસે છે અને રીસેટ કરે છે
N70Z-50: Z અક્ષ રીસેટ
N80G04X5: અવલોકન માટે થોભો
N90M99;
એ નોંધવું અગત્યનું છે કે માપેલ પરિણામો વર્કબેન્ચની વિવિધ ઓપરેટિંગ ગતિના આધારે બદલાઈ શકે છે. સામાન્ય રીતે, ઓછી ઝડપે માપેલ મૂલ્ય ઊંચી ઝડપ કરતા વધારે હોય છે, ખાસ કરીને જ્યારે મશીન ટૂલ એક્સિસ લોડ અને ગતિ પ્રતિકાર નોંધપાત્ર હોય. નીચી ઝડપે, વર્કટેબલ ધીમી ગતિએ આગળ વધે છે, પરિણામે ઓવરશૂટ અને ઓવરટ્રાવેલની શક્યતા ઓછી થાય છે, તેથી ઉચ્ચ માપેલ મૂલ્ય પ્રાપ્ત થાય છે. બીજી તરફ, ઝડપી વર્કટેબલ સ્પીડને કારણે વધુ ઝડપે ઓવરશૂટ અને ઓવરટ્રાવેલ થવાની શક્યતા વધુ હોય છે, જેના પરિણામે માપવામાં આવેલ મૂલ્ય ઓછું થાય છે. રોટરી ગતિ અક્ષના વિપરીત વિચલન માટે માપનનો અભિગમ રેખીય અક્ષની સમાન પ્રક્રિયાને અનુસરે છે, માત્ર તફાવત એ તપાસ માટે વપરાતું સાધન છે.

બેકલેશ માટે વળતર
દેશમાં બનેલા અસંખ્ય CNC મશીન ટૂલ્સ 0.02mm કરતાં વધુની સ્થિતિની ચોકસાઈ દર્શાવે છે, છતાં વળતર માટે ક્ષમતાનો અભાવ છે. અમુક પરિસ્થિતિઓમાં, પ્રોગ્રામિંગ તકનીકોનો ઉપયોગ વન-વે પોઝિશનિંગને પૂર્ણ કરવા અને આવા મશીન ટૂલ્સ માટે બેકલેશને દૂર કરવા માટે કરી શકાય છે. જ્યાં સુધી યાંત્રિક ઘટક અપરિવર્તિત રહે ત્યાં સુધી, ઈન્ટરપોલેશન પ્રક્રિયા શરૂ કરવી શક્ય છે એકવાર ઓછી ગતિ, એક-માર્ગી સ્થિતિ પ્રક્ષેપ માટે પ્રારંભિક બિંદુ સુધી પહોંચે. ઇન્ટરપોલેશન ફીડ દરમિયાન વિપરીત દિશાનો સામનો કરતી વખતે, રિવર્સ ક્લિયરન્સ મૂલ્યને ઔપચારિક રીતે પ્રક્ષેપિત કરવાથી ઇન્ટરપોલેશન પ્રોસેસિંગની ચોકસાઈ વધારવાની અને અસરકારક રીતે પૂરી કરવાની ક્ષમતા હોય છે.સીએનસી મિલ્ડ ભાગની સહનશીલતા જરૂરિયાતો.
CNC મશીન ટૂલ્સની અન્ય જાતો માટે, CNC ઉપકરણમાં બહુવિધ મેમરી એડ્રેસ સામાન્ય રીતે દરેક અક્ષના બેકલેશ મૂલ્યને સંગ્રહિત કરવા માટે નિયુક્ત કરવામાં આવે છે. જ્યારે મશીન ટૂલના અક્ષને તેની હિલચાલની દિશા બદલવા માટે નિર્દેશિત કરવામાં આવે છે, ત્યારે CNC ઉપકરણ આપમેળે ધરીના બેકલેશ મૂલ્યને પુનઃપ્રાપ્ત કરશે, જે સંકલન વિસ્થાપન આદેશ મૂલ્યને વળતર આપે છે અને સુધારે છે. આ સુનિશ્ચિત કરે છે કે મશીન ટૂલ કમાન્ડ પોઝિશન પર ચોક્કસ રીતે સ્થિત થઈ શકે છે અને મશીન ટૂલની ચોકસાઈ પર વિપરીત વિચલનની પ્રતિકૂળ અસરને ઘટાડે છે.
સામાન્ય રીતે, CNC સિસ્ટમો એક ઉપલબ્ધ બેકલેશ વળતર મૂલ્યથી સજ્જ હોય છે. હાઇ- અને લો-સ્પીડ ગતિની ચોકસાઇને સંતુલિત કરવી, તેમજ યાંત્રિક સુધારણાને સંબોધિત કરવી, પડકારરૂપ બની જાય છે. વધુમાં, ઝડપી ગતિ દરમિયાન માપવામાં આવતા વિપરીત વિચલન મૂલ્યનો ઉપયોગ ફક્ત ઇનપુટ વળતર મૂલ્ય તરીકે જ થઈ શકે છે. પરિણામે, કટિંગ દરમિયાન ઝડપી સ્થિતિની ચોકસાઈ અને પ્રક્ષેપની ચોકસાઈ વચ્ચે સંતુલન હાંસલ કરવું મુશ્કેલ સાબિત થાય છે.

FANUC0i અને FANUC18i જેવી CNC સિસ્ટમો માટે, ઝડપી ગતિ (G00) અને ધીમી ગતિ કટીંગ ફીડ ગતિ (G01) માટે બેકલેશ વળતરના બે ઉપલબ્ધ સ્વરૂપો છે. પસંદ કરેલ ફીડિંગ પદ્ધતિ પર આધાર રાખીને, CNC સિસ્ટમ ઉન્નત પ્રોસેસિંગ ચોકસાઇ પ્રાપ્ત કરવા માટે આપમેળે અલગ વળતર મૂલ્યો પસંદ કરે છે અને તેનો ઉપયોગ કરે છે.
G01 કટીંગ ફીડ મોશનમાંથી મેળવેલ બેકલેશ મૂલ્ય A, પેરામીટર NO11851 માં દાખલ કરવું જોઈએ (G01 ટ્રાયલની ઝડપ સામાન્ય રીતે ઉપયોગમાં લેવાતી કટીંગ ફીડની ઝડપ અને મશીન ટૂલ લાક્ષણિકતાઓના આધારે નક્કી થવી જોઈએ), જ્યારે G00 માંથી બેકલેશ મૂલ્ય B ઇનપુટ કરવું જોઈએ. પરિમાણ NO11852 માં. એ નોંધવું અગત્યનું છે કે જો CNC સિસ્ટમ અલગથી ઉલ્લેખિત રિવર્સ બેકલેશ વળતરનો અમલ કરવા માંગે છે, તો પેરામીટર નંબર 1800 નો ચોથો આંકડો (RBK) 1 પર સેટ કરવો આવશ્યક છે; અન્યથા, અલગથી ઉલ્લેખિત રિવર્સ બેકલેશ વળતર હાથ ધરવામાં આવશે નહીં. ગેપ વળતર. G02, G03, JOG અને G01 બધા સમાન વળતર મૂલ્યનો ઉપયોગ કરે છે.

પિચ ભૂલો માટે વળતર
CNC મશીન ટૂલ્સની ચોકસાઈની સ્થિતિ એ ચોકસાઈના મૂલ્યાંકનનો સમાવેશ કરે છે જેની સાથે મશીન ટૂલના જંગમ ઘટકો CNC સિસ્ટમના આદેશ હેઠળ પહોંચી શકે છે. પરંપરાગત મશીનોથી CNC મશીન ટૂલ્સને અલગ પાડવામાં આ ચોકસાઇ નિર્ણાયક ભૂમિકા ભજવે છે. મશીન ટૂલની ભૌમિતિક ચોકસાઇ સાથે સંરેખિત, તે કટીંગ ચોકસાઇને નોંધપાત્ર રીતે અસર કરે છે, ખાસ કરીને છિદ્ર મશીનિંગમાં. હોલ ડ્રિલિંગમાં પિચની ભૂલ નોંધપાત્ર અસર કરે છે. CNC મશીન ટૂલની તેની પ્રોસેસિંગ ચોકસાઇનું મૂલ્યાંકન કરવાની ક્ષમતા પ્રાપ્ત સ્થિતિની ચોકસાઈ પર આધાર રાખે છે. તેથી, પ્રક્રિયાની ગુણવત્તા સુનિશ્ચિત કરવા માટે CNC મશીન ટૂલ્સની સ્થિતિની ચોકસાઈની શોધ અને સુધારણા એ આવશ્યક પગલાં છે.
પિચ માપન પ્રક્રિયા
હાલમાં, મશીન ટૂલ્સના મૂલ્યાંકન અને સંચાલન માટેની પ્રાથમિક પદ્ધતિ એ ડ્યુઅલ-ફ્રિકવન્સી લેસર ઇન્ટરફેરોમીટરનો ઉપયોગ છે. આ ઇન્ટરફેરોમીટર્સ લેસર ઇન્ટરફેરોમેટ્રીના સિદ્ધાંતો પર કાર્ય કરે છે અને માપન માટેના સંદર્ભ તરીકે રીઅલ-ટાઇમ લેસર તરંગલંબાઇનો ઉપયોગ કરે છે, જેનાથી માપનની ચોકસાઇમાં વધારો થાય છે અને એપ્લિકેશનની શ્રેણીને વિસ્તારવામાં આવે છે.
પિચ શોધવા માટેની પ્રક્રિયા નીચે મુજબ છે:
- ડ્યુઅલ-ફ્રિકવન્સી લેસર ઇન્ટરફેરોમીટર ઇન્સ્ટોલ કરો.
- ઓપ્ટિકલ માપન ઉપકરણને મશીન ટૂલની ધરી સાથે સ્થિત કરો જેને માપનની જરૂર હોય.
- લેસર હેડને સંરેખિત કરો તેની ખાતરી કરવા માટે કે માપન અક્ષ કાં તો મશીન ટૂલની ચળવળ અક્ષ સાથે સમાંતર અથવા સમકક્ષ છે, આમ ઓપ્ટિકલ પાથને પૂર્વ-સંરેખિત કરો.
- એકવાર લેસર તેના ઓપરેટિંગ તાપમાને પહોંચી જાય પછી માપન પરિમાણોને ઇનપુટ કરો.
- મશીન ટૂલને ખસેડીને નિર્ધારિત માપન પ્રક્રિયાઓ ચલાવો.
- ડેટા પર પ્રક્રિયા કરો અને પરિણામો બનાવો.
પિચ ભૂલ વળતર અને સ્વચાલિત માપાંકન
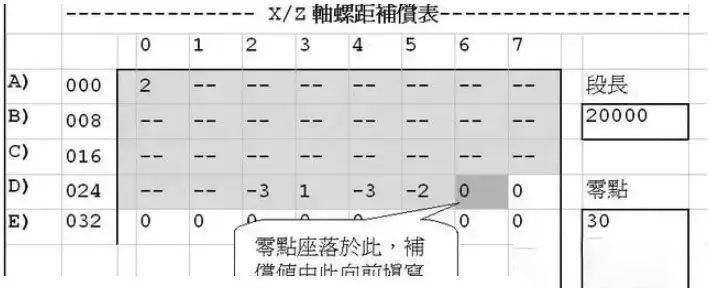
જ્યારે CNC મશીન ટૂલની માપેલી સ્થિતિની ભૂલ સ્વીકાર્ય શ્રેણીને વટાવી જાય છે, ત્યારે ભૂલને સુધારવાની જરૂર છે. એક પ્રચલિત અભિગમમાં પિચ એરર કમ્પેન્સેશન ટેબલની ગણતરી કરવી અને પોઝિશનિંગ એરરને સુધારવા માટે તેને મશીન ટૂલની CNC સિસ્ટમમાં મેન્યુઅલી ઇનપુટ કરવાનો સમાવેશ થાય છે. જો કે, મેન્યુઅલ વળતર સમય માંગી લે તેવું અને ભૂલો માટે જોખમી હોઈ શકે છે, ખાસ કરીને જ્યારે CNC મશીન ટૂલના ત્રણ અથવા ચાર અક્ષો પર અસંખ્ય વળતર બિંદુઓ સાથે કામ કરતી વખતે.
આ પ્રક્રિયાને સુવ્યવસ્થિત કરવા માટે, એક ઉકેલ વિકસાવવામાં આવ્યો છે. RS232 ઇન્ટરફેસ દ્વારા કમ્પ્યુટર અને મશીન ટૂલના CNC નિયંત્રકને લિંક કરીને અને VB માં બનાવેલ સ્વચાલિત કેલિબ્રેશન સોફ્ટવેરનો લાભ લઈને, લેસર ઇન્ટરફેરોમીટર અને CNC મશીન ટૂલને સિંક્રનાઇઝ કરવું શક્ય છે. આ સિંક્રનાઇઝેશન CNC મશીન ટૂલની સ્થિતિની ચોકસાઈની સ્વચાલિત શોધ અને સ્વચાલિત પિચ ભૂલ વળતરના અમલીકરણને સક્ષમ કરે છે. વળતર પદ્ધતિમાં શામેલ છે:
- CNC કંટ્રોલ સિસ્ટમમાં હાલના વળતર પરિમાણોનો બેકઅપ બનાવવો.
- કમ્પ્યુટરનો ઉપયોગ કરીને પોઈન્ટ-બાય-પોઈન્ટ પોઝીશનીંગ ચોકસાઈ માપન માટે મશીન ટૂલ CNC પ્રોગ્રામ જનરેટ કરવું, જે પછી CNC સિસ્ટમમાં ટ્રાન્સમિટ થાય છે.
- દરેક બિંદુની સ્થિતિની ભૂલને આપમેળે માપવા.
- પૂર્વનિર્ધારિત વળતર બિંદુઓના આધારે વળતર પરિમાણોનો નવો સેટ જનરેટ કરવો અને તેને સ્વચાલિત પિચ વળતર માટે CNC સિસ્ટમમાં ટ્રાન્સમિટ કરવું.
- ચોકસાઈની વારંવાર ચકાસણી કરવી.
આ વિશિષ્ટ ઉકેલોનો હેતુ CNC મશીન ટૂલ્સની ચોકસાઈ વધારવાનો છે. તેમ છતાં, એ નોંધવું જરૂરી છે કે વિવિધ CNC મશીન ટૂલ્સની ચોકસાઈ અલગ-અલગ હોઈ શકે છે. પરિણામે, મશીન ટૂલ્સને તેમના વ્યક્તિગત સંજોગો અનુસાર માપાંકિત કરવું જોઈએ.
જો મશીન ટૂલ પર ભૂલ ભરપાઈ કરવામાં ન આવે, તો ઉત્પાદિત CNC ભાગો પર તેની શું અસર થશે?
જો મશીન ટૂલ પર ભૂલ વળતરની અવગણના કરવામાં આવે, તો તે વિસંગતતાઓમાં પરિણમી શકે છેCNC ભાગોઉત્પાદિત. દાખલા તરીકે, જો મશીન ટૂલમાં અવ્યવસ્થિત સ્થિતિની ભૂલ હોય, તો ટૂલ અથવા વર્કપીસની સાચી સ્થિતિ CNC પ્રોગ્રામમાં નિર્દિષ્ટ પ્રોગ્રામ કરેલી સ્થિતિથી અલગ થઈ શકે છે, જે ઉત્પાદિત ભાગોમાં પરિમાણીય અચોક્કસતા અને ભૌમિતિક ભૂલો તરફ દોરી જાય છે.
ઉદાહરણ તરીકે, જો CNC મિલિંગ મશીનમાં X-અક્ષમાં અવ્યવસ્થિત સ્થિતિની ભૂલ હોય, તો વર્કપીસમાં મિલ્ડ સ્લોટ્સ અથવા છિદ્રો ખોટી રીતે સંકલિત અથવા ખોટા પરિમાણો હોઈ શકે છે. તેવી જ રીતે, લેથ ઓપરેશનમાં, અવ્યવસ્થિત સ્થિતિની ભૂલો વળેલા ભાગોના વ્યાસ અથવા લંબાઈમાં અચોક્કસતા પેદા કરી શકે છે. આ વિસંગતતાઓ બિન-અનુરૂપ ભાગો તરફ દોરી શકે છે જે નિષ્ફળ જાય છે
Anebon શ્રેષ્ઠ અને ઉત્તમ બનવા માટે દરેક સખત મહેનત કરશે અને OEM, કસ્ટમ માટે ચાઇના ગોલ્ડ સપ્લાયર માટે ઇન્ટરકોન્ટિનેન્ટલ ટોપ-ગ્રેડ અને હાઇ-ટેક એન્ટરપ્રાઇઝના રેન્કમાંથી ઊભા રહેવા માટેના અમારા પગલાંને ઝડપી બનાવશે.સીએનસી મશીનિંગ સેવા, શીટ મેટલ ફેબ્રિકેશન સેવા, મિલિંગ સેવાઓ. Anebon તમારા પોતાના સંતોષકારક પરિપૂર્ણ કરવા માટે તમારી વ્યક્તિગત ખરીદી કરશે! Anebonનો વ્યવસાય આઉટપુટ વિભાગ, મહેસૂલ વિભાગ, ઉત્તમ નિયંત્રણ વિભાગ અને સેવા કેન્દ્ર વગેરે સહિત અનેક વિભાગો સ્થાપે છે.
ફેક્ટરી સપ્લાય ચાઇનાચોકસાઇ ભાગ અને એલ્યુમિનિયમ ભાગ, તમે Anebon ને તમારા પોતાના મૉડલ માટે અનન્ય ડિઝાઇન વિકસાવવા માટે તમારા વિચાર જણાવી શકો છો જેથી બજારમાં વધુ પડતા સમાન ભાગોને અટકાવી શકાય! અમે તમારી બધી જરૂરિયાતોને સંતોષવા માટે અમારી શ્રેષ્ઠ સેવા આપવા જઈ રહ્યા છીએ! તરત જ Anebon નો સંપર્ક કરવાનું યાદ રાખો!
પોસ્ટ સમય: જાન્યુઆરી-09-2024