
ຄໍານິຍາມຂອງຄວາມຮູ້ກົນຈັກໂດຍ Anebon
ຄວາມຮູ້ທາງດ້ານກົນຈັກແມ່ນຄວາມສາມາດໃນການເຂົ້າໃຈແລະນໍາໃຊ້ແນວຄວາມຄິດກົນຈັກຕ່າງໆ, ຫຼັກການແລະການປະຕິບັດ. ຄວາມຮູ້ທາງດ້ານກົນຈັກປະກອບມີຄວາມເຂົ້າໃຈຂອງເຄື່ອງຈັກ, ກົນໄກແລະວັດສະດຸເຊັ່ນດຽວກັນກັບເຄື່ອງມືແລະຂະບວນການ. ນີ້ປະກອບມີຄວາມຮູ້ຂອງຫຼັກການກົນຈັກ, ເຊັ່ນ: ຜົນບັງຄັບໃຊ້ແລະການເຄື່ອນທີ່, ພະລັງງານແລະລະບົບຂອງເກຍແລະ pulleys. ຄວາມຮູ້ດ້ານວິສະວະກໍາກົນຈັກປະກອບມີການອອກແບບ, ການບໍາລຸງຮັກສາແລະການແກ້ໄຂບັນຫາ, ເຊັ່ນດຽວກັນກັບຫຼັກການວິສະວະກໍາກົນຈັກ. ຄວາມຮູ້ທາງດ້ານກົນຈັກແມ່ນສໍາຄັນສໍາລັບຫຼາຍອາຊີບແລະອຸດສາຫະກໍາທີ່ເຮັດວຽກກັບລະບົບກົນຈັກ. ເຫຼົ່ານີ້ລວມມີວິສະວະກໍາ, ການຜະລິດແລະການກໍ່ສ້າງ.
1. ຮູບແບບຂອງຄວາມລົ້ມເຫຼວຂອງພາກສ່ວນກົນຈັກແມ່ນຫຍັງ?
(1) ການແຕກຫັກທັງໝົດ
(2) ການບິດເບືອນແບບຖາວອນຫຼາຍເກີນໄປ
(3) ຄວາມບົກຜ່ອງດ້ານສ່ວນຫນຶ່ງ
(4) ການເຮັດວຽກຜິດປົກກະຕິເນື່ອງຈາກການຂັດຂວາງສະພາບການເຮັດວຽກປົກກະຕິ
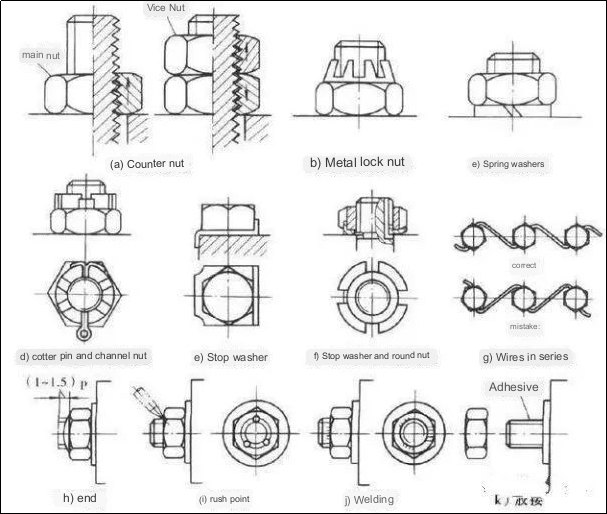
ເຫດຜົນຢູ່ເບື້ອງຫຼັງຄວາມຕ້ອງການເລື້ອຍໆຂອງການຕ້ານການ unscrewing ສໍາລັບການເຊື່ອມຕໍ່ threaded ແມ່ນຫຍັງ?
ແນວຄວາມຄິດຫຼັກຂອງການຕ້ານການ unscrewing ແມ່ນຫຍັງ?
ມີວິທີການຕ່າງໆເພື່ອປ້ອງກັນການວ່າງ?
ຄໍາຕອບ:
ໂດຍທົ່ວໄປ, ການເຊື່ອມຕໍ່ກະທູ້ສາມາດປະຕິບັດເງື່ອນໄຂຂອງການລັອກດ້ວຍຕົນເອງແລະຈະບໍ່ວ່າງ spontaneous. ຢ່າງໃດກໍຕາມ, ໃນສະຖານະການທີ່ກ່ຽວຂ້ອງກັບການສັ່ນສະເທືອນ, ການໂຫຼດຜົນກະທົບ, ຫຼືການປ່ຽນແປງຂອງອຸນຫະພູມທີ່ຮຸນແຮງ, ມີຄວາມເປັນໄປໄດ້ຂອງຫມາກແຫ້ງເປືອກແຂງເຊື່ອມຕໍ່ຄ່ອຍໆ loosening. ສາເຫດຕົ້ນຕໍຂອງການພວນ thread ແມ່ນຢູ່ໃນການຫມູນວຽນທີ່ກ່ຽວຂ້ອງລະຫວ່າງຄູ່ thread. ດັ່ງນັ້ນ, ມັນເປັນສິ່ງຈໍາເປັນທີ່ຈະລວມເອົາມາດຕະການຕ້ານການວ່າງລົງໃນການອອກແບບຕົວຈິງ.
ວິທີການໃຊ້ງານທົ່ວໄປປະກອບມີ:
1. ການຕ້ານການ loosening ໂດຍອີງໃສ່ friction - ຮັກສາ friction ລະຫວ່າງຄູ່ thread ເພື່ອປ້ອງກັນບໍ່ໃຫ້ loosening, ເຊັ່ນ: ການນໍາໃຊ້ washers ພາກຮຽນ spring ແລະແກ່ນສອງດ້ານເທິງ;
2. ກົນຈັກຕ້ານການ loosening — ການນໍາໃຊ້ອຸປະສັກສ່ວນປະກອບເຄື່ອງຈັກເພື່ອຮັບປະກັນການຕ້ານການວ່າງ, ມັກຈະໃຊ້ແກ່ນຫມາກຖົ່ວແລະ pins cotter, ແລະອື່ນໆ;
3. ການຂັດຂວາງການຕ້ານການວ່າງຂອງຄູ່ thread - ການປັບປຸງແລະການປ່ຽນແປງຄວາມສໍາພັນລະຫວ່າງຄູ່ thread, ເຊັ່ນ: ໂດຍຜ່ານການນໍາໃຊ້ເຕັກນິກການຜົນກະທົບ.
ຈຸດປະສົງຂອງການເຄັ່ງຄັດໃນການເຊື່ອມຕໍ່ threaded ແມ່ນຫຍັງ?
Provide ວິທີການຫຼາຍສໍາລັບການຄວບຄຸມການບັງຄັບໃຊ້.
ຄໍາຕອບ:
ຄວາມຕັ້ງໃຈທີ່ຢູ່ເບື້ອງຫລັງການເຄັ່ງຄັດໃນການເຊື່ອມຕໍ່ threaded ແມ່ນເພື່ອອະນຸຍາດໃຫ້ bolts ເພື່ອສ້າງກໍາລັງ pre-tightening. ຂະບວນການຍຶດຫມັ້ນທາງສ່ວນຫນ້ານີ້ພະຍາຍາມເສີມຂະຫຍາຍຄວາມຫນ້າເຊື່ອຖືແລະຄວາມແຫນ້ນຫນາຂອງການເຊື່ອມຕໍ່ເພື່ອປ້ອງກັນບໍ່ໃຫ້ຊ່ອງຫວ່າງຫຼືການເຄື່ອນໄຫວທີ່ກ່ຽວຂ້ອງລະຫວ່າງພາກສ່ວນທີ່ເຊື່ອມຕໍ່ກັນພາຍໃຕ້ເງື່ອນໄຂການໂຫຼດ. ສອງເຕັກນິກທີ່ມີປະສິດທິພາບສໍາລັບການຄວບຄຸມກໍາລັງແຫນ້ນແມ່ນການນໍາໃຊ້ wrench torque ຫຼື wrench torque ຄົງທີ່. ເມື່ອເຖິງແຮງບິດທີ່ຕ້ອງການ, ມັນສາມາດຖືກລັອກເຂົ້າໄປໃນສະຖານທີ່. ອີກທາງເລືອກ, ການຍືດຕົວຂອງສາຍປະຕູສາມາດຖືກວັດແທກເພື່ອຄວບຄຸມການບັງຄັບກ່ອນການເຄັ່ງຕຶງ.
ການເລື່ອນ elastic ແຕກຕ່າງຈາກການເລື່ອນຊັ້ນໃນສາຍແອວແນວໃດ?
ໃນການອອກແບບຂອງ V-belt drive, ເປັນຫຍັງຈຶ່ງມີຂໍ້ຈໍາກັດກ່ຽວກັບເສັ້ນຜ່າສູນກາງຂັ້ນຕ່ໍາຂອງ pulley ຂະຫນາດນ້ອຍ?
ຄໍາຕອບ:
ການເລື່ອນ Elastic ເປັນຕົວແທນຂອງລັກສະນະຂອງສາຍແອວທີ່ບໍ່ສາມາດຫຼີກເວັ້ນໄດ້. ມັນເກີດຂື້ນໃນເວລາທີ່ມີຄວາມແຕກຕ່າງກັນໃນຄວາມກົດດັນແລະວັດສະດຸສາຍແອວຕົວມັນເອງແມ່ນ elastomer. ໃນທາງກົງກັນຂ້າມ, skidding ແມ່ນປະເພດຂອງຄວາມລົ້ມເຫຼວທີ່ເກີດຂື້ນຍ້ອນການໂຫຼດເກີນແລະຄວນຈະຖືກປ້ອງກັນໃນຄ່າໃຊ້ຈ່າຍທັງຫມົດ.
ໂດຍສະເພາະ, skidding ເກີດຂຶ້ນໃນ pulley ຂະຫນາດນ້ອຍ. ການໂຫຼດພາຍນອກທີ່ເພີ່ມຂຶ້ນເຮັດໃຫ້ຄວາມເຄັ່ງຕຶງລະຫວ່າງສອງດ້ານມີຄວາມແຕກຕ່າງກັນຫຼາຍ, ເຊິ່ງເຮັດໃຫ້ການຂະຫຍາຍພື້ນທີ່ທີ່ມີການເລື່ອນ elastic ເກີດຂື້ນ. ການເລື່ອນ Elastic ສະແດງເຖິງການປ່ຽນແປງທາງດ້ານປະລິມານ, ໃນຂະນະທີ່ການເລື່ອນລອຍຫມາຍເຖິງການປ່ຽນແປງທາງດ້ານຄຸນນະພາບ. ດັ່ງນັ້ນ, ເພື່ອປ້ອງກັນບໍ່ໃຫ້ skidding, ມີຂໍ້ຈໍາກັດກ່ຽວກັບເສັ້ນຜ່າກາງຕໍາ່ສຸດທີ່ຂອງ pulley ຂະຫນາດນ້ອຍ, ເນື່ອງຈາກວ່າເສັ້ນຜ່າກາງ pulley ຂະຫນາດນ້ອຍເຮັດໃຫ້ມຸມຫໍ່ຂະຫນາດນ້ອຍແລະພື້ນທີ່ຕິດຕໍ່ຫຼຸດລົງ, ເຮັດໃຫ້ slippage ມັກຈະເກີດຂຶ້ນ.
ຄວາມໄວເລື່ອນຂອງພື້ນຜິວແຂ້ວກ່ຽວຂ້ອງກັບຄວາມກົດດັນຕິດຕໍ່ທີ່ອະນຸຍາດຂອງທາດເຫຼັກສຽງໂຫວດທັງຫມົດສີຂີ້ເຖົ່າແລະອາລູມິນຽມ bronze turbines ທາດເຫຼັກແນວໃດ?
ຄໍາຕອບ:
ຄວາມກົດດັນການຕິດຕໍ່ທີ່ອະນຸຍາດຂອງທາດເຫຼັກສຽງໂຫວດທັງຫມົດສີຂີ້ເຖົ່າແລະອາລູມິນຽມ bronze turbines ທາດເຫຼັກແມ່ນອິດທິພົນໂດຍຄວາມໄວເລື່ອນຂອງຫນ້າແຂ້ວເນື່ອງຈາກຮູບແບບຄວາມລົ້ມເຫຼວທີ່ສໍາຄັນທີ່ຮູ້ຈັກເປັນ adhesion ພື້ນຜິວແຂ້ວ. ການຍຶດຕິດແມ່ນໄດ້ຮັບຜົນກະທົບໂດຍກົງຈາກຄວາມໄວເລື່ອນ, ດັ່ງນັ້ນຈຶ່ງມີຜົນກະທົບຕໍ່ຄວາມກົດດັນຕິດຕໍ່ທີ່ອະນຸຍາດ. ໃນອີກດ້ານຫນຶ່ງ, ຮູບແບບຄວາມລົ້ມເຫຼວຕົ້ນຕໍຂອງ turbine bronze ຫລໍ່ຫລໍ່ແມ່ນ pits ດ້ານແຂ້ວ, ເຊິ່ງເກີດມາຈາກຄວາມກົດດັນຕິດຕໍ່. ດັ່ງນັ້ນ, ຄວາມກົດດັນຕິດຕໍ່ທີ່ອະນຸຍາດແມ່ນບໍ່ກ່ຽວຂ້ອງກັບຄວາມໄວເລື່ອນ.
Enumeate ກົດຫມາຍປົກກະຕິຂອງການເຄື່ອນໄຫວ, ລັກສະນະຜົນກະທົບ, ແລະສະຖານະການທີ່ເຫມາະສົມສໍາລັບການຕິດຕາມກົນໄກ cam.
ຄໍາຕອບ:
ກົດຫມາຍການເຄື່ອນໄຫວສໍາລັບການຕິດຕາມກົນໄກ cam ປະກອບມີການເຄື່ອນໄຫວຄວາມໄວຄົງທີ່, ກົດຫມາຍວ່າດ້ວຍການເຄື່ອນໄຫວຊ້າຕ່າງໆ, ແລະການເຄື່ອນໄຫວສົມກົມກຽວງ່າຍດາຍ (ກົດຫມາຍວ່າດ້ວຍການເຄື່ອນໄຫວເລັ່ງ cosine). ກົດໝາຍການເຄື່ອນທີ່ດ້ວຍຄວາມໄວຄົງທີ່ສະແດງຜົນກະທົບທີ່ເຄັ່ງຄັດ ແລະພົບເຫັນການນຳໄປໃຊ້ໃນສະຖານະການທີ່ມີຄວາມໄວຕ່ຳ ແລະເບົາ.
ກົດຫມາຍວ່າດ້ວຍການເຄື່ອນໄຫວຊ້າ, ລວມທັງການເລັ່ງຄົງທີ່, ຄຸນນະສົມບັດຜົນກະທົບທີ່ປ່ຽນແປງໄດ້ແລະເຫມາະສົມສໍາລັບສະຖານະການຄວາມໄວປານກາງຫາຕ່ໍາ. ການເຄື່ອນໄຫວແບບປະສົມກົມກຽວແບບງ່າຍດາຍ (ກົດເກນການເລັ່ງການເລັ່ງຂອງ cosine 4-chord) ສະຫນອງຜົນກະທົບອ່ອນໆເມື່ອມີໄລຍະຢຸດຊົ່ວຄາວ, ເຮັດໃຫ້ມັນເປັນປະໂຫຍດສໍາລັບສະຖານະການຄວາມໄວປານກາງເຖິງຕ່ໍາ. ໃນສະຖານະການທີ່ມີຄວາມໄວສູງໂດຍບໍ່ມີການພັກຜ່ອນ, ບໍ່ມີຜົນກະທົບທີ່ມີຄວາມຍືດຫຍຸ່ນ, ເຮັດໃຫ້ມັນເຫມາະສົມກັບສະຖານະການເຫຼົ່ານັ້ນ.
ສະຫຼຸບຫຼັກການພື້ນຖານການຄຸ້ມຄອງຕາຫນ່າງ profile ແຂ້ວ.
ຄໍາຕອບ:
ບໍ່ວ່າບ່ອນໃດທີ່ໂຄງສ້າງຂອງແຂ້ວເຮັດໃຫ້ການຕິດຕໍ່, ເສັ້ນປົກກະຕິທົ່ວໄປທີ່ຜ່ານຈຸດຕິດຕໍ່ຕ້ອງຕັດຈຸດສະເພາະໃນເສັ້ນສູນກາງ. ເງື່ອນໄຂນີ້ຮັບປະກັນອັດຕາສ່ວນການສົ່ງຕໍ່ທີ່ສອດຄ່ອງຖືກຮັກສາໄວ້.
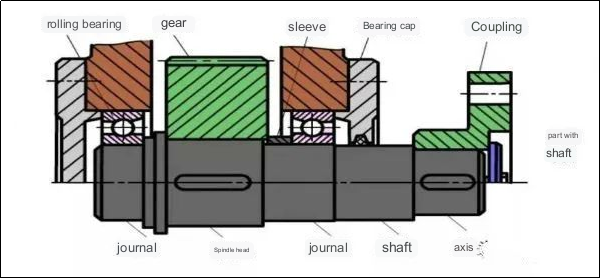
ມີວິທີການຕ່າງໆໃນການສ້ອມແຊມຊິ້ນສ່ວນທີ່ອ້ອມຮອບຢູ່ shaft ມີຫຍັງແດ່? (ໃຫ້ຫຼາຍກວ່າສີ່ວິທີ)
ຄໍາຕອບ:
ຄວາມເປັນໄປໄດ້ຂອງການສ້ອມແຊມ Circumferential ປະກອບມີການນໍາໃຊ້ການເຊື່ອມຕໍ່ທີ່ສໍາຄັນ, ການເຊື່ອມຕໍ່ splined, ການເຊື່ອມຕໍ່ເຫມາະ interference, screw ທີ່ກໍານົດໄວ້, ການເຊື່ອມຕໍ່ pin, ແລະຮ່ວມການຂະຫຍາຍຕົວ.
ເຕັກນິກການສ້ອມແຊມຕາມແກນຕົ້ນຕໍປະເພດໃດແດ່ສໍາລັບການຕິດຊິ້ນສ່ວນກັບ shaft?
ຄຸນລັກສະນະທີ່ໂດດເດັ່ນຂອງແຕ່ລະຄົນແມ່ນຫຍັງ? (ກ່າວເຖິງຫຼາຍກວ່າສີ່)
ຄໍາຕອບ:
ວິທີການແກ້ໄຂແກນສໍາລັບການຕິດຊິ້ນສ່ວນກັບ shaft ກວມເອົາຫຼາຍປະເພດທີ່ສໍາຄັນ, ແຕ່ລະຄົນມີລັກສະນະທີ່ແຕກຕ່າງກັນ. ເຫຼົ່ານີ້ລວມມີການແກ້ໄຂຄໍ, ການສ້ອມແຊມ threaded, fixation ບົບໄຮໂດຼລິກ, ແລະການສ້ອມແຊມ flange. ການສ້ອມແຊມຄໍປະກອບດ້ວຍການໃຊ້ຄໍຫຼືຕົວຍຶດທີ່ແຫນ້ນແຫນ້ນຮອບເພົາເພື່ອຮັບປະກັນສ່ວນທີ່ເປັນແກນ. ການສ້ອມແຊມ threaded ປະກອບມີການນໍາໃຊ້ກະທູ້ກ່ຽວກັບ shaft ຫຼືພາກສ່ວນເພື່ອ fasten ໃຫ້ເຂົາເຈົ້າແຫນ້ນ. ການສ້ອມແຊມໄຮໂດຼລິກໃຊ້ແຮງດັນໄຮໂດຼລິກເພື່ອສ້າງການເຊື່ອມຕໍ່ທີ່ແຫນ້ນຫນາລະຫວ່າງສ່ວນແລະ shaft. Flange fixation ກ່ຽວຂ້ອງກັບການນໍາໃຊ້ຂອງ flange ທີ່ bolted ຫຼື welded ກັບພາກສ່ວນເຄື່ອງຈັກ cncແລະ shaft ໄດ້, ຮັບປະກັນການຍຶດຕິດຕາມແກນທີ່ປອດໄພ.
ເປັນຫຍັງມັນຈຶ່ງຈໍາເປັນຕ້ອງປະຕິບັດການຄິດໄລ່ຄວາມດຸ່ນດ່ຽງຄວາມຮ້ອນສໍາລັບການຂັບແມ່ທ້ອງຫຸ້ມ?
ຄໍາຕອບ:
ໜອນທີ່ປິດລ້ອມຈະສະແດງການເລື່ອນທີ່ສົມທຽບກັນ ແລະ ມີລະດັບຄວາມສຽດສີສູງ. ເນື່ອງຈາກຄວາມສາມາດໃນການກະຈາຍຄວາມຮ້ອນທີ່ຈໍາກັດແລະແນວໂນ້ມຂອງບັນຫາການຍຶດຕິດ, ການຄິດໄລ່ຄວາມດຸ່ນດ່ຽງຂອງຄວາມຮ້ອນກາຍເປັນສິ່ງຈໍາເປັນ.
ທິດສະດີການຄຳນວນຄວາມແຮງສອງອັນໃດທີ່ໃຊ້ໃນການຄຳນວນກຳລັງເກຍ?
ພວກເຂົາເຈົ້າກໍາລັງເປົ້າຫມາຍຄວາມລົ້ມເຫລວແນວໃດ?
ຖ້າລະບົບສາຍສົ່ງເກຍໃຊ້ພື້ນແຂ້ວອ່ອນປິດ, ມາດຕະຖານການອອກແບບຂອງມັນແມ່ນຫຍັງ?
ຄໍາຕອບ:
ການຄິດໄລ່ຄວາມແຮງຂອງເກຍກ່ຽວຂ້ອງກັບການກໍານົດຄວາມເຂັ້ມແຂງຄວາມເມື່ອຍລ້າຂອງການຕິດຕໍ່ຂອງຫນ້າແຂ້ວແລະຄວາມເຂັ້ມແຂງຂອງຄວາມເມື່ອຍລ້າງໍຂອງຮາກແຂ້ວ. ຄວາມແຂງແຮງຂອງຄວາມເມື່ອຍລ້າໃນການຕິດຕໍ່ແມ່ນມີຈຸດປະສົງເພື່ອປ້ອງກັນຄວາມລົ້ມເຫຼວຂອງຄວາມເຫນື່ອຍລ້າໃນດ້ານຂອງແຂ້ວ, ໃນຂະນະທີ່ຄວາມເຂັ້ມແຂງຂອງຄວາມເຫນື່ອຍລ້າທີ່ໂຄ້ງແກ້ໄຂການກະດູກຫັກ fatigue ໃນຮາກແຂ້ວ. ການສົ່ງເກຍທີ່ໃຊ້ພື້ນແຂ້ວອ່ອນທີ່ປິດແມ່ນປະຕິບັດຕາມມາດຕະຖານການອອກແບບຂອງການພິຈາລະນາຄວາມແຂງແຮງຂອງຄວາມເມື່ອຍລ້າຂອງການຕິດຕໍ່ຂອງຫນ້າແຂ້ວແລະການກວດສອບຄວາມເຂັ້ມແຂງຂອງຄວາມເມື່ອຍລ້າທີ່ງໍຂອງຮາກແຂ້ວ.
ໜ້າທີ່ຂອງຂໍ້ຕໍ່ ແລະ clutches ແມ່ນຫຍັງ?
ພວກເຂົາແຕກຕ່າງຈາກກັນແລະກັນແນວໃດ?
ຄໍາຕອບ:
ທັງສອງ couplings ແລະ clutches ໃຫ້ບໍລິການຈຸດປະສົງຂອງການເຊື່ອມຕໍ່ສອງ shafts ເພື່ອເຮັດໃຫ້ການສົ່ງ torque ແລະການຫມຸນ synchronized. ຢ່າງໃດກໍຕາມ, ພວກເຂົາເຈົ້າມີຄວາມແຕກຕ່າງກັນໃນແງ່ຂອງຄວາມສາມາດ disengagement ຂອງເຂົາເຈົ້າໃນລະຫວ່າງການປະຕິບັດງານ. ຄouplings ເຊື່ອມຕໍ່ shafts ທີ່ບໍ່ສາມາດແຍກອອກໃນຂະນະທີ່ຢູ່ໃນການນໍາໃຊ້; disconnection ຂອງ ເຂົາ ເຈົ້າ ແມ່ນ ເປັນ ໄປ ໄດ້ ພຽງ ແຕ່ ໂດຍ disassembling ໄດ້ພາກສ່ວນຫັນຫຼັງຈາກການປິດ. ໃນອີກດ້ານຫນຶ່ງ, clutches ສະຫນອງຄວາມສາມາດໃນການປະກອບຫຼື disengage ສອງ shafts ໃນທຸກເວລາໃດຫນຶ່ງໃນລະຫວ່າງການເຮັດວຽກຂອງເຄື່ອງຈັກ.
ອະທິບາຍຂໍ້ກໍານົດເບື້ອງຕົ້ນທີ່ຈຳເປັນສໍາລັບລູກປືນຟິມນໍ້າມັນເພື່ອເຮັດວຽກຢ່າງຖືກຕ້ອງ.
ຄໍາຕອບ:
ທັງສອງດ້ານທີ່ດໍາເນີນການເຄື່ອນທີ່ທີ່ກ່ຽວຂ້ອງຕ້ອງສ້າງຊ່ອງຫວ່າງທີ່ມີຮູບແຂບ; ຄວາມໄວເລື່ອນລະຫວ່າງຫນ້າດິນຕ້ອງຮັບປະກັນການເຂົ້ານ້ໍາມັນຫລໍ່ລື່ນຈາກທ່າເຮືອໃຫຍ່ກວ່າແລະອອກຈາກທ່າເຮືອນ້ອຍກວ່າ; ນ້ ຳ ມັນຫລໍ່ລື່ນຕ້ອງມີຄວາມໜຽວສະເພາະ, ແລະການສະ ໜອງ ນ້ ຳ ມັນທີ່ພຽງພໍແມ່ນມີຄວາມ ຈຳ ເປັນ.
ໃຫ້ຄໍາອະທິບາຍໂດຍຫຍໍ້ກ່ຽວກັບຜົນກະທົບ, ຄຸນນະສົມບັດຈໍາແນກ, ແລະການນໍາໃຊ້ປົກກະຕິຂອງຕົວແບບ 7310.
ຄໍາຕອບ:
ການຕີຄວາມໝາຍຂອງລະຫັດ: ລະຫັດ “7″ ສະແດງເຖິງການຕິດຕໍ່ກັນເປັນລ່ຽມ. ການອອກແບບ "(0)" ຫມາຍເຖິງຄວາມກວ້າງມາດຕະຖານ, ໂດຍ "0" ເປັນທາງເລືອກ. ຕົວເລກ “3″ ໝາຍເຖິງຊຸດຂະໜາດກາງໃນແງ່ຂອງເສັ້ນຜ່າສູນກາງ. ສຸດທ້າຍ, "10" ເທົ່າກັບເສັ້ນຜ່າສູນກາງຂອງລູກປືນພາຍໃນ 50 ມມ.
ຄຸນນະສົມບັດແລະຄໍາຮ້ອງສະຫມັກ:
ຮູບແບບລູກປືນນີ້ສາມາດທົນກັບການໂຫຼດ radial ແລະ axial ພ້ອມກັນໃນທິດທາງດຽວ. ມັນສະຫນອງຄວາມໄວຈໍາກັດສູງແລະປົກກະຕິແລ້ວຖືກນໍາໃຊ້ເປັນຄູ່.
ພາຍໃນລະບົບສາຍສົ່ງທີ່ລວມເອົາລະບົບສາຍສົ່ງເກຍ, ສາຍສົ່ງສາຍແອວ, ແລະລະບົບຕ່ອງໂສ້ລະບົບສາຍສົ່ງ, ໂດຍທົ່ວໄປແລ້ວລະບົບສາຍສົ່ງປະເພດໃດຖືກວາງຢູ່ໃນລະດັບຄວາມໄວສູງສຸດ?
ໃນທາງກົງກັນຂ້າມ, ອົງປະກອບລະບົບສາຍສົ່ງໃດຖືກຈັດຢູ່ໃນຕໍາແຫນ່ງເກຍຕ່ໍາສຸດ?
ອະທິບາຍເຫດຜົນທີ່ຢູ່ເບື້ອງຫຼັງການຈັດການນີ້.
ຄໍາຕອບ:
ໂດຍທົ່ວໄປແລ້ວ, ການຂັບສາຍແອວແມ່ນຕັ້ງຢູ່ໃນລະດັບຄວາມໄວສູງສຸດ, ໃນຂະນະທີ່ການຂັບລົດຕ່ອງໂສ້ຖືກຈັດໃສ່ໃນຕໍາແຫນ່ງເກຍຕ່ໍາສຸດ. ການຂັບສາຍແອວມີຄຸນລັກສະນະເຊັ່ນລະບົບສາຍສົ່ງທີ່ຫມັ້ນຄົງ, ເບາະ, ແລະການດູດຊຶມ, ເຮັດໃຫ້ມັນເປັນປະໂຫຍດສໍາລັບມໍເຕີທີ່ມີຄວາມໄວສູງ. ໃນທາງກົງກັນຂ້າມ, ການຂັບລົດຕ່ອງໂສ້ມີແນວໂນ້ມທີ່ຈະສ້າງສິ່ງລົບກວນໃນລະຫວ່າງການປະຕິບັດງານແລະເຫມາະສົມກັບສະຖານະການທີ່ມີຄວາມໄວຕ່ໍາ, ດັ່ງນັ້ນໂດຍທົ່ວໄປແລ້ວຈະຖືກຈັດສັນໃຫ້ກັບຂັ້ນຕອນຂອງເກຍຕ່ໍາ.
ແມ່ນຫຍັງທີ່ເປັນສາເຫດຂອງຄວາມໄວທີ່ບໍ່ເປັນເອກະພາບໃນການສົ່ງຕໍ່ລະບົບຕ່ອງໂສ້?
ປັດໃຈຕົ້ນຕໍທີ່ມີອິດທິພົນຕໍ່ມັນແມ່ນຫຍັງ?
ພາຍໃຕ້ເງື່ອນໄຂໃດທີ່ອັດຕາສ່ວນການສົ່ງຕໍ່ທັນທີສາມາດຄົງທີ່?
ຄໍາຕອບ:
1) ຄວາມໄວທີ່ບໍ່ສະຫມໍ່າສະເຫມີໃນລະບົບຕ່ອງໂສ້ລະບົບສາຍສົ່ງແມ່ນເກີດມາຈາກຜົນກະທົບ polygonal ປະກົດຂຶ້ນຢູ່ໃນກົນໄກລະບົບຕ່ອງໂສ້; 2) ປັດໃຈສໍາຄັນທີ່ມີອິດທິພົນຕໍ່ມັນປະກອບມີຄວາມໄວຂອງລະບົບຕ່ອງໂສ້, pitch ລະບົບຕ່ອງໂສ້, ແລະຈໍານວນແຂ້ວ sprocket; 3) ເມື່ອຈໍານວນຂອງແຂ້ວຂອງທັງສອງ sprockets ໃຫຍ່ແລະຂະຫນາດນ້ອຍແມ່ນເທົ່າທຽມກັນ (ie, z1 = z2) ແລະໄລຍະຫ່າງລະຫວ່າງເຂົາເຈົ້າເປັນຄວາມຄູນທີ່ແນ່ນອນຂອງ pitch (p), ອັດຕາສ່ວນການສົ່ງທັນທີທັນໃດຄົງທີ່ 1.
ເປັນຫຍັງຄວາມກວ້າງຂອງແຂ້ວ (b1) ຂອງ pinion ຈຶ່ງໃຫຍ່ກວ່າຄວາມກວ້າງຂອງແຂ້ວເລັກນ້ອຍ (b2) ຂອງເກຍໃຫຍ່ກວ່າໃນການຫຼຸດເກຍກະບອກ?
ເມື່ອຄິດໄລ່ຄວາມເຂັ້ມແຂງ, ຄ່າສໍາປະສິດຄວາມກວ້າງຂອງແຂ້ວ (ψd) ຄວນອີງໃສ່ b1 ຫຼື b2? ເປັນຫຍັງ?
ຄໍາຕອບ:
1) ເພື່ອປ້ອງກັນການ misalignment axial ຂອງເກຍເນື່ອງຈາກຄວາມຜິດພາດການປະກອບ, ຄວາມກວ້າງຂອງແຂ້ວຕາຫນ່າງແມ່ນຫຼຸດລົງ, ເຮັດໃຫ້ການເພີ່ມຂຶ້ນຂອງການເຮັດວຽກ. ດັ່ງນັ້ນ, ຄວາມກວ້າງຂອງແຂ້ວ (b1) ຂອງເກຍນ້ອຍຄວນຈະມີຂະໜາດໃຫຍ່ກວ່າ b2 ຂອງເກຍໃຫຍ່ກວ່າເລັກນ້ອຍ. ການຄິດໄລ່ຄວາມເຂັ້ມແຂງຄວນຈະອີງໃສ່ຄວາມກວ້າງຂອງແຂ້ວ (b2) ຂອງເກຍທີ່ໃຫຍ່ກວ່າເພາະວ່າມັນສະແດງເຖິງຄວາມກວ້າງຂອງການຕິດຕໍ່ຕົວຈິງເມື່ອຄູ່ຂອງເກຍກະບອກ.
ເປັນຫຍັງເສັ້ນຜ່າສູນກາງຂອງ pulley ຂະຫນາດນ້ອຍ (d1) ຄວນເທົ່າກັບຫຼືໃຫຍ່ກວ່າເສັ້ນຜ່າກາງຕໍາ່ສຸດທີ່ (dmin) ແລະມຸມຫໍ່ຂອງລໍ້ຂັບ (α1) ເທົ່າກັບຫຼືໃຫຍ່ກວ່າ 120 °ໃນສາຍແອວ deceleration?
ໂດຍທົ່ວໄປແລ້ວ, ຄວາມໄວສາຍແອວທີ່ແນະນໍາແມ່ນຢູ່ລະຫວ່າງ 5 ຫາ 25 m/s.
ຄຕາມລໍາດັບຖ້າຄວາມໄວສາຍແອວເກີນຂອບເຂດນີ້ບໍ?
ຄໍາຕອບ:
1) ເສັ້ນຜ່າກາງຂະຫນາດນ້ອຍຂອງ pulley ຂະຫນາດນ້ອຍເຮັດໃຫ້ຄວາມກົດດັນຂອງງໍສູງຂຶ້ນໃນສາຍແອວ. ເພື່ອປ້ອງກັນຄວາມກົດດັນຂອງງໍຫຼາຍເກີນໄປ, ເສັ້ນຜ່າກາງຕ່ໍາສຸດຂອງ pulley ຂະຫນາດນ້ອຍຄວນໄດ້ຮັບການຮັກສາໄວ້.
2) ມຸມຫໍ່ (α1) ຂອງລໍ້ຂັບຜົນກະທົບຕໍ່ຄວາມກົດດັນປະສິດທິພາບສູງສຸດຂອງສາຍແອວ. α1 ຂະຫນາດນ້ອຍເຮັດໃຫ້ຜົນບັງຄັບໃຊ້ການດຶງປະສິດທິພາບສູງສຸດຕ່ໍາ. ເພື່ອເພີ່ມແຮງດຶງທີ່ມີປະສິດທິພາບສູງສຸດແລະປ້ອງກັນການເລື່ອນ, ໂດຍທົ່ວໄປມຸມຫໍ່ຂອງα1≥120°ແມ່ນແນະນໍາ.
3) ຖ້າຫາກວ່າຄວາມໄວສາຍແອວຢູ່ນອກລະດັບຂອງ 5 ຫາ 25 m/s, ອາດຈະມີຜົນສະທ້ອນ. ຄວາມໄວທີ່ຕໍ່າກວ່າຂອບເຂດອາດຈະຕ້ອງການແຮງດຶງທີ່ມີປະສິດຕິຜົນຂະຫນາດໃຫຍ່ (Fe), ນໍາໄປສູ່ການເພີ່ມຂື້ນຂອງສາຍແອວ (z) ແລະໂຄງສ້າງຂອງສາຍແອວທີ່ໃຫຍ່ກວ່າ. ໃນທາງກັບກັນ, ຄວາມໄວສາຍແອວຫຼາຍເກີນໄປຈະສົ່ງຜົນໃຫ້ແຮງ centrifugal ສູງຂຶ້ນ (Fc), ຈໍາເປັນຕ້ອງລະມັດລະວັງ.
Pros ແລະ cons ຂອງການມ້ວນ helical.
ຄໍາຕອບ:
ຂໍ້ດີ
1) ມັນສະແດງໃຫ້ເຫັນການສວມໃສ່ຫນ້ອຍທີ່ສຸດ, ແລະເຕັກນິກການປັບສາມາດຖືກນໍາໃຊ້ເພື່ອລົບລ້າງການເກັບກູ້ແລະກະຕຸ້ນໃຫ້ລະດັບໃດຫນຶ່ງຂອງ pre-deformation, ດັ່ງນັ້ນການເພີ່ມຄວາມເຂັ້ມງວດແລະບັນລຸຄວາມຖືກຕ້ອງຂອງສາຍສົ່ງສູງ.
2) ບໍ່ເຫມືອນກັບລະບົບ locking ຕົນເອງ, ມັນສາມາດແປງການເຄື່ອນໄຫວ linear ເປັນ rotary motion.
ຂໍ້ເສຍ
1) ໂຄງປະກອບການແມ່ນຊັບຊ້ອນແລະມີຄວາມທ້າທາຍໃນການຜະລິດ.
2) ກົນໄກບາງຢ່າງອາດຈະຈໍາເປັນຕ້ອງມີກົນໄກການລັອກຕົນເອງເພີ່ມເຕີມເພື່ອປ້ອງກັນການຖອນຄືນ.
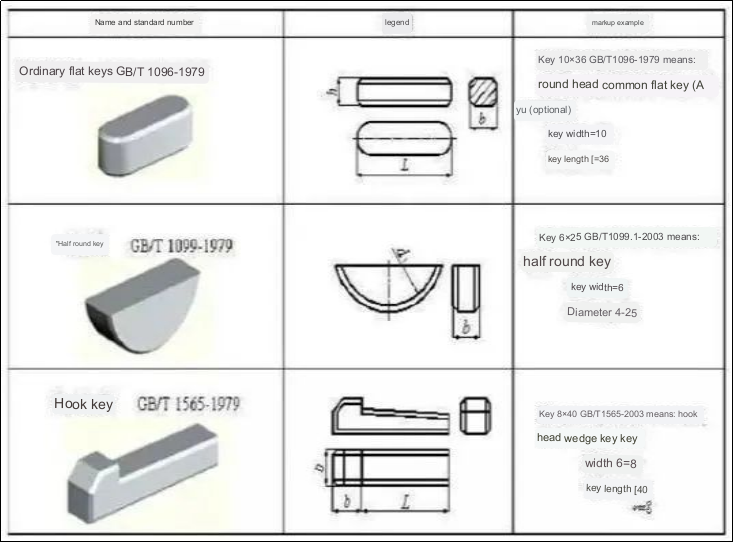
ຫຼັກການພື້ນຖານສໍາລັບການເລືອກກະແຈແມ່ນຫຍັງ?
ຄໍາຕອບ:
ເມື່ອເລືອກຄີ, ມີການພິຈາລະນາທີ່ສໍາຄັນສອງຢ່າງ: ປະເພດແລະຂະຫນາດ. ການເລືອກປະເພດແມ່ນຂຶ້ນກັບປັດໃຈເຊັ່ນ: ຄຸນລັກສະນະຂອງໂຄງສ້າງຂອງການເຊື່ອມຕໍ່ທີ່ສໍາຄັນ, ຄວາມຕ້ອງການການນໍາໃຊ້ແລະເງື່ອນໄຂການເຮັດວຽກ.
ໃນທາງກົງກັນຂ້າມ, ການເລືອກຂະຫນາດຄວນຍຶດຫມັ້ນກັບຂໍ້ກໍານົດມາດຕະຖານແລະຄວາມຕ້ອງການຄວາມເຂັ້ມແຂງ. ຂະຫນາດຂອງກະແຈປະກອບດ້ວຍຂະຫນາດຕັດກັນ (ຄວາມກວ້າງຂອງກະແຈ b * ຄວາມສູງທີ່ສໍາຄັນ h) ແລະຄວາມຍາວ L. ທາງເລືອກຂອງຂະຫນາດຂອງພາກຕັດ b * h ຖືກກໍານົດໂດຍເສັ້ນຜ່າກາງ shaft d, ໃນຂະນະທີ່ຄວາມຍາວຂອງກະແຈ L ສາມາດ ໂດຍທົ່ວໄປແລ້ວຈະຖືກກໍານົດໂດຍອີງໃສ່ຄວາມຍາວຂອງ hub, ຊຶ່ງຫມາຍຄວາມວ່າຄວາມຍາວທີ່ສໍາຄັນ L ບໍ່ຄວນເກີນຄວາມຍາວຂອງ hub. ນອກຈາກນັ້ນ, ສໍາລັບກະແຈຮາບພຽງ, ຄວາມຍາວຂອງສູນກາງ L' ໂດຍທົ່ວໄປແມ່ນປະມານ (1.5-2) ເທົ່າຂອງເສັ້ນຜ່າກາງ shaft d, ໂດຍຄໍານຶງເຖິງຄວາມຍາວຂອງ hub ແລະໄລຍະຫ່າງເລື່ອນ.
Anebon ອີງໃສ່ຄວາມສາມາດດ້ານວິຊາການທີ່ເຂັ້ມແຂງຂອງຕົນແລະສືບຕໍ່ພັດທະນາເຕັກໂນໂລຊີກ້າວຫນ້າທາງດ້ານເພື່ອຕອບສະຫນອງຄວາມຕ້ອງການຂອງການປຸງແຕ່ງໂລຫະ CNC,5 ແກນ cnc milling, ແລະການຫລໍ່ລົດໃຫຍ່. ພວກເຮົາໃຫ້ຄຸນຄ່າສູງກັບຄໍາແນະນໍາທັງຫມົດແລະຄໍາຄຶດຄໍາເຫັນ. ຜ່ານການຮ່ວມມືທີ່ດີ, ພວກເຮົາສາມາດບັນລຸການພັດທະນາແລະປັບປຸງເຊິ່ງກັນແລະກັນ.
ໃນຖານະເປັນຜູ້ຜະລິດ ODM ໃນປະເທດຈີນ, Anebon ມີຄວາມຊ່ຽວຊານໃນການປັບແຕ່ງຊິ້ນສ່ວນສະແຕມອາລູມິນຽມແລະອົງປະກອບເຄື່ອງຈັກການຜະລິດ. ໃນປັດຈຸບັນ, ຜະລິດຕະພັນຂອງພວກເຮົາໄດ້ຖືກສົ່ງອອກໄປຫຼາຍກວ່າຫົກສິບປະເທດແລະພາກພື້ນຕ່າງໆໃນທົ່ວໂລກ, ລວມທັງອາຊີຕາເວັນອອກສຽງໃຕ້, ອາເມລິກາ, ອາຟຣິກາ, ເອີຣົບຕາເວັນອອກ, ລັດເຊຍ, ແລະການາດາ. Anebon ມຸ່ງຫມັ້ນທີ່ຈະສ້າງການເຊື່ອມຕໍ່ຢ່າງກວ້າງຂວາງກັບລູກຄ້າທີ່ມີທ່າແຮງໃນປະເທດຈີນແລະພາກສ່ວນອື່ນໆຂອງໂລກ.
ເວລາປະກາດ: ສິງຫາ-16-2023