
Znate li koliko postoji metoda za precizno podešavanje alata na CNC tokarilicama?
Metoda dodirne sonde: - Ova metoda koristi sondu koja dodiruje alat za mjerenje njegovog položaja u odnosu na referentnu točku stroja. Daje točne podatke o promjeru i duljini alata.
Prednamještač alata:Naprava za prednamještanje alata koristi se za mjerenje dimenzija alata izvan stroja. Ova metoda omogućuje brzo i točno postavljanje alata.
Metoda odstupanja alata:– Kod ove metode operater mjeri duljinu i promjer alata pomoću alata kao što su čeljust i mikrometar. Vrijednosti se zatim unose u upravljački sustav stroja.
Mjerenje laserskim alatom:Laserski sustavi koriste se za postavljanje i mjerenje dimenzija alata. Projiciranjem zrake laserskog svjetla na oštricu alata, oni daju točne i brze podatke o alatu.
Metoda prepoznavanja slike:Napredni računalni sustavi mogu koristiti tehnologiju prepoznavanja slika za automatski izračun dimenzija alata. To rade tako što snimaju slike alata, analiziraju njegove značajke i zatim izračunavaju mjere.
Ovo je vrlo koristan članak. Članak prvo predstavlja načela i ideje iza "metode postavljanja alata probnog rezanja" koja se obično koristi s CNC tokarilicama. Zatim se uvode četiri ručne metode probnog podešavanja alata za rezanje za CNC sustave tokarenja. Kako bi se poboljšala točnost postavki alata, razvijena je programski kontrolirana metoda automatskog probnog rezanja koja se temelji na "automatskom rezanju - mjerenju - kompenzaciji pogreške". Također su sažete četiri točne metode postavljanja alata.
1. Princip i ideje koje stoje iza metode postavljanja alata za CNC tokarilice
Razumijevanje principa postavljanja alata CNC tokarilice važno je za operatere koji žele zadržati jasne ideje o postavljanju alata, ovladati operacijama postavljanja alata i predlagati nove metode. Podešavanje alata je određivanje nulte pozicije koordinatnog sustava obratka, koja se mijenja kod programiranja koordinatnog sustava alatnog stroja. Postavljanje alata uključuje dobivanje koordinata stroja za početnu točku referentnog programa alata i određivanje odstupanja alata u odnosu na taj alat.
Sljedeće konvencije koriste se za demonstraciju koncepata i ideja iza postavljanja alata pomoću metode probnog rezanja. Koristite Hua srednjovjekovni Star Teaching Turning System (broj verzije 5.30 aplikacijskog softvera); upotrijebite središte desne krajnje strane na obratku za ishodište programa i postavite ga naredbom G92. Programiranje promjera, koordinate izratka početne točke programa H su (100,50); postavite četiri alata na držač alata. Alat br. 1 je alat za grubo tokarenje od 90 stupnjeva, a alat br. 2 je alat za fino tokarenje izvan kruga od 90 stupnjeva. nož, br. br. 4. nož je trokutasti nož s navojem pod kutom od 60 stupnjeva (svi primjeri u članku su isti).
Za podešavanje alata koriste se koordinate "alatnog stroja". Kao što je prikazano na slici 1, referentni alat “ručno testno reže vanjski krug i čeonu površinu izratka i bilježi XZ koordinate alatnog stroja na zaslonu. Koordinate alatnog stroja za početak programa O izvode se iz odnosa između koordinata alatnog stroja u točki A i O: XO=XA – Phd, ZO=ZA. Koristeći koordinate obratka za H u odnosu na točku O (100,50), konačno možemo izvesti koordinate alatnog stroja za točku H: XH=100 – Phd, ZH=ZA+50. Ovaj koordinatni sustav obratka temelji se na položaju vrha alata na referentnom alatu.
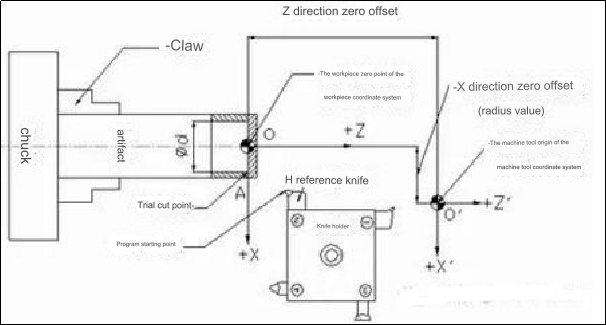
Slika 1. Shematski dijagram za ručno probno rezanje i postavke alata
Na slici 2, pomak između točke A i vrha alata B nastaje zbog razlika u proširenjima i položajima u X- i Z-smjeru alata stegnutih u držač alata. Izvorni koordinatni sustav za izradak više nije valjan. Svaki alat također će se trošiti različitom brzinom tijekom upotrebe. Stoga se vrijednosti odstupanja alata i istrošenosti za svaki alat moraju kompenzirati.
Za određivanje pomaka alata, svaki alat mora biti poravnat s određenom referentnom točkom (točka A ili B na slici 1) na izratku. CRT prikazuje koordinate alatnog stroja koje se razlikuju od odstupanja alata nereferentnih alata. Stoga se nalaze na istoj točki. Korištenjem ručnih izračuna ili izračuna softvera, koordinate alatnog stroja se oduzimaju od koordinata referentnog alata. Pomak alata se zatim izračunava za svaki nestandardni uređaj.
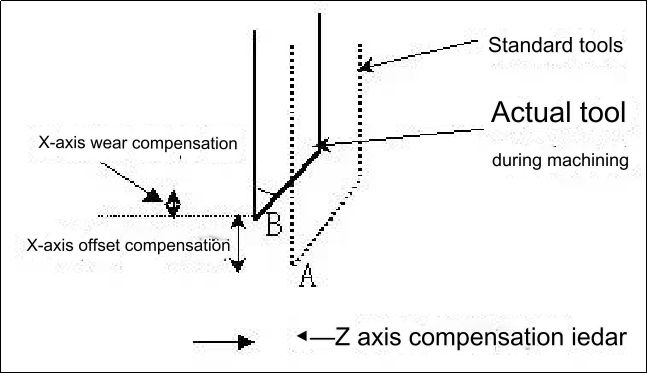
Slika 2 Kompenzacija za pomak alata i trošenje
Točnost ručnih probnih postavki alata za rezanje je ograničena. Ovo je poznato kao gruba obrada alata. Kao što je prikazano na slici 3, za postizanje preciznijih rezultata unutar dopuštenja za strojnu obraducnc auto dio, može se dizajnirati jednostavan automatizirani program probnog rezanja. Referentni nož se kontinuirano modificira korištenjem koncepta "automatsko rezanje-mjerenje-kompenzacija pogreške". Odmak alata i početna točka programa nereferentnog alata koriste se kako bi se osiguralo da razlika između vrijednosti upute za obradu i stvarne izmjerene vrijednosti zadovoljava zahtjeve točnosti. Precizno podešavanje alata je podešavanje alata koje se događa u ovoj fazi.
Uobičajeno je ispraviti nestandardne pomake nakon početnog ispravljanja. To je zato što je osiguravanje točnosti početne točke referentnog alata preduvjet za točna odstupanja alata.
Ovaj osnovni postupak postavljanja alata postiže se kombinacijom ove dvije faze: ručnim probnim rezom noža s referencom kako bi se dobile koordinate alatnog stroja za referentnu postavku alata. – Izračunajte ili automatski izračunajte odstupanja alata za svaki nereferentni alat. – Referentni nož nalazi se na približnom početku programa. – Referentni nož više puta poziva program testnog rezanja. Držač alata će se pomaknuti u MDI ili korak modu kako bi se kompenzirale pogreške i ispravio položaj početne točke. Nakon mjerenja veličine, neosnovni nož će opetovano pozivati program testnog rezanja. Odmak alata se ispravlja na temelju ovog odstupanja. To znači da će referentni alat biti nepomičan na točnom početku programa.
Slika 3. Shematski dijagram postavljanja alata za probno rezanje s više noževa
Pregled tehnika grubog postavljanja noža
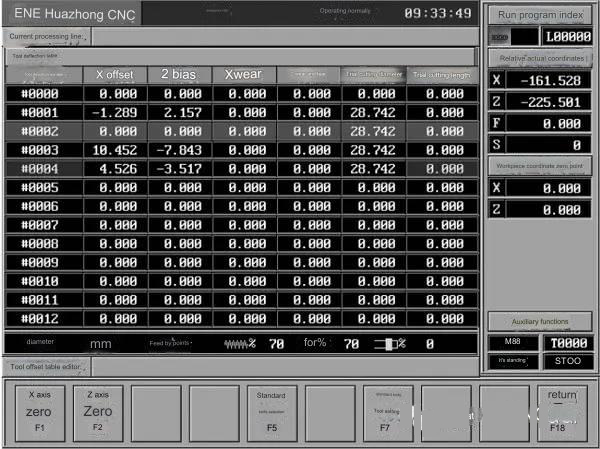
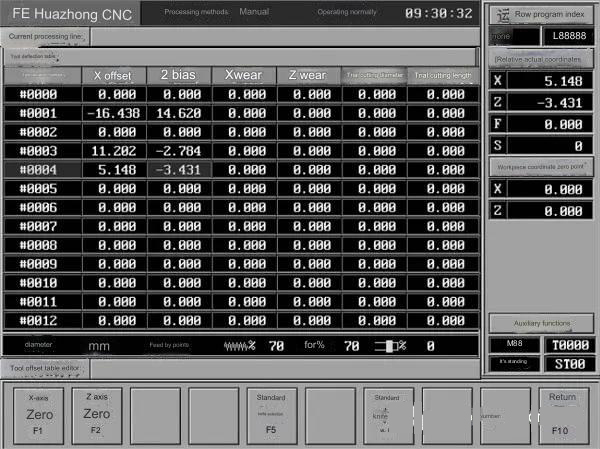
Za pripremu za postavljanje alata, možete koristiti bilo koju od sljedećih metoda: pritisnite tipku F2 u podizborniku MDI sustava za pristup tablici odstupanja alata. Pomoću tipki pomaknite istaknutu traku na poziciju broja alata koja odgovara svakom alatu i pritisnite gumb F5. Promijenite vrijednosti pomaka X i Z za brojeve pomaka alata #0000 i #0001, zatim pritisnite tipku F5.
1) Automatski postavite metodu odstupanja alata odabirom referentnog alata.
Koraci za postavljanje alata prikazani su na slikama 1 i 4.
Plava traka označena tipkama može se pomicati kako bi se poravnao pomak alata #0002 za referentni alat br. 2. Referentni alat 2. Za postavljanje br. 2 pritisnite tipku F5. Alat 2 bit će postavljen kao zadani alat.
2) Izrežite vanjski krug referentnim alatom i zabilježite X koordinate alatnog stroja. Nakon uvlačenja alata, zaustavite stroj i izmjerite vanjski promjer segmenta osovine.
3) Referentna lopatica vraća se u točku A snimljenu metodom "jog+step". Unesite PhD i nulu u stupce za promjer rezanja testa i duljinu rezanja testa.
4) Uvucite standardni alat i odaberite broj nestandardnog alata. Zatim ručno promijenite alat. Vrh alata za svaki nestandardni alat treba vizualno poravnati s točkom A koristeći metodu "jog+step". Podesite odgovarajući pomak nakon što je alat vizualno poravnat. Ako unesete nulu i doktorat u stupce za duljinu i promjer probnog rezanja, odmaci noža svih nereferentnih noževa automatski će se prikazati u stupcu X odmak i Z odmak.
5) Nakon što se referentni alat vrati u točku A, MDI će pokrenuti “G91 G00/ili” G01 X[100 PhD] Z50 kako bi došao do početne točke programa.
Slika 4 Shematski dijagram referentnog alata koji automatski postavlja pomak alata za standardni alat
2. Postavite koordinate referentnog alata na nulu na referentnoj točki postavljanja alata i automatski prikažite metodu odstupanja alata
Kao što je prikazano na slici 1 i slici 5, koraci postavljanja alata su sljedeći:
1) Isto kao u koraku (2) iznad.
2) Referentni nož se vraća na probnu točku rezanja A kroz metodu "jog + step" prema zabilježenoj vrijednosti.
3) U sučelju prikazanom na slici 4, pritisnite tipku F1 za "postavljanje X-osi na nulu" i pritisnite F2 tipku za "postavljanje Z-osi na nulu". Tada su "relativne stvarne koordinate" koje prikazuje CRT (0, 0).
4) Ručno promijenite nereferentni alat tako da njegov vrh alata bude vizualno poravnat s točkom A. U ovom trenutku, vrijednost "relativnih stvarnih koordinata" prikazanih na CRT-u je pomak alata u odnosu na referentni alat. Pomoću tipki ▲ i pomaknite plavu Označite broj odstupanja alata nereferentnog alata, zabilježite ga i unesite na odgovarajuću poziciju.
5) Isto kao prethodni korak (5).
Slika 5 Shematski dijagram odstupanja alata koji se automatski prikazuje kada je referentni alat postavljen na nulu u koordinatama referentnih točaka postavljanja alata.
3. Metoda pomaka noža izračunava se ručnim izračunavanjem probnog rezanja s više noževa vanjskog kružnog segmenta osovine.
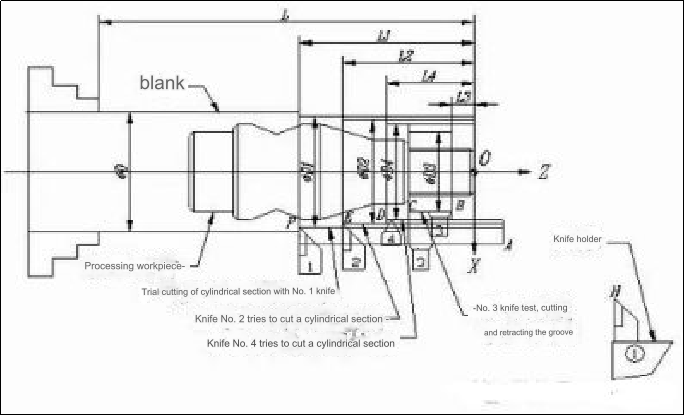
Kao što je prikazano na slici 6, sustav ručno poravnava noževe 1, 2 i 4 i izrezuje os. Zatim bilježi koordinate stroja za rezne krajeve svakog noža. (Točke F, D i E na slici 6). Izmjerite promjer i duljinu za svaki segment. Zamijenite nož za rezanje br. 1. Kao što je prikazano na slici, izrežite udubljenje alata. Poravnajte oštricu za rezanje s desnim vrhom, zabilježite koordinate za točku B i izmjerite L3 i PhD3 prema slici. Inkrementalni koordinatni odnos između F, E i D točaka za svaki alat i O ishodišta može se odrediti usporedbom gornjih podataka.
Tada se može vidjeti da su koordinate alatnog stroja (X2-PhD2+100 i Z2-L2+50), a koordinate alatnog stroja za početnu točku programa odgovaraju referentnom alatu. Način izračuna prikazan je u tablici 1. U prazna polja upišite izračunate i evidentirane vrijednosti. Napomena: Udaljenost probnog rezanja je udaljenost između koordinatne nulte točke obratka i krajnje točke probnog rezanja u Z-smjeru. Pozitivni i negativni smjerovi određeni su koordinatnom osi.
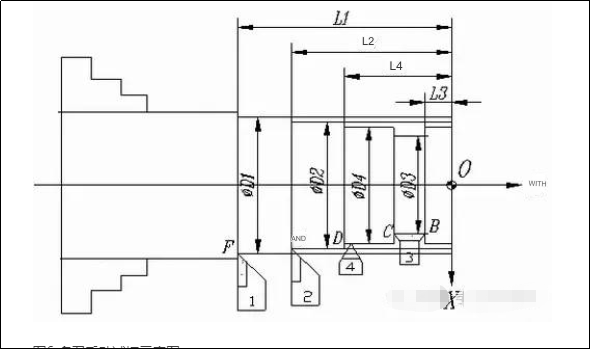
Slika 6. Shematski dijagram ručnog probnog rezanja s više noževa
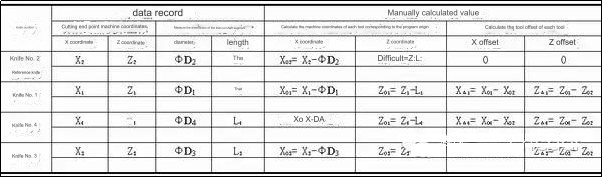
Tablica 1. Izračun odstupanja alata za nestandardne alate
Ova metoda omogućuje jednostavan postupak probnog rezanja, budući da eliminira potrebu za vizualnim poravnavanjem probnih točaka rezanja. Međutim, pomak noža mora se izračunati ručno. Odmak alata možete brzo izračunati ako ispišete list s formulom i zatim ispunite praznine.
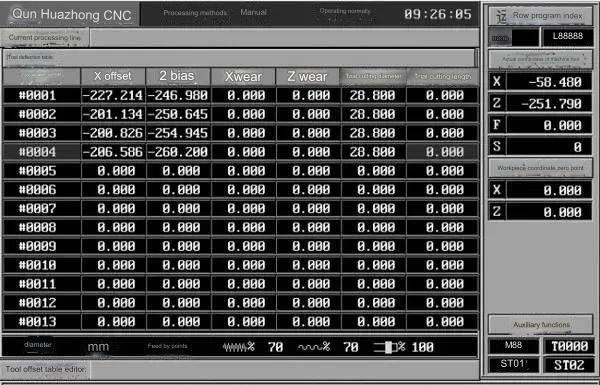
Slika 7. Shematski dijagram za automatsko podešavanje alata na Century Star CNC sustavu
Metoda automatskog skupa alata s više alata za CNC sustav 4th Century Star
Sve gore navedene metode za odstupanje alata su relativne metode. Nakon što stručno osoblje izvrši podešavanje parametara i testiranje sustava, HNC-21T omogućuje korisnicima da odaberu "metodu apsolutnog pomaka" prilikom postavljanja alata. U programiranju strojne obrade, apsolutni pomak alata je malo drugačiji od metode relativnog isključenja alata. Nije potrebno koristiti G92 ili G54 za koordinatne sustave obratka, niti je potrebno poništiti kompenzaciju alata. Pogledajte program O1005 za primjer. Kao što je prikazano na slici 6, nakon što se sustav vrati na nulu, neka svaki nož pokuša ručno prerezati dio cilindra.
Ispunite brojeve odstupanja alata za svaki nož nakon mjerenja duljine i promjera. Duljina probnog rezanja navedena je u stupcu za promjer probnog rezanja. Softver sustava, koristeći metodu opisanu u “Rezanje vanjskog segmenta osovine s više noževa – Ručni izračun za pomak noža”, može automatski izračunati koordinate alatnog stroja za svaki nož prema izvoru programa. Ovaj način postavljanja alata je najbrži, a posebno je pogodan za industrijsku proizvodnju.
Sažetak pet točnih tehnika postavljanja alata
Princip preciznog podešavanja alata je "automatsko mjerenje, automatsko probno rezanje i kompenzacija pogreške". Kompenzacija pogreške može se podijeliti u dvije kategorije: za MDI operaciju referentnog alata ili postupno pomicanje stupova alata za kompenzaciju početne pozicije programa; i za nestandardne alate za kompenzaciju njegovih vrijednosti pomaka ili istrošenosti alata. Kako bi se izbjegla zabuna, tablica 2 je dizajnirana za izračunavanje i bilježenje vrijednosti.
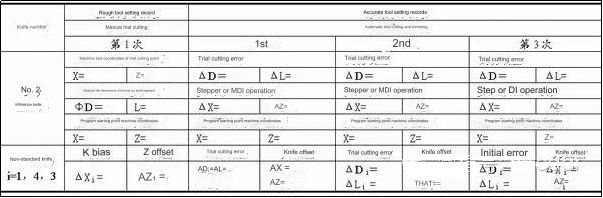
Tablica 2. Tablica zapisa o postavljanju alata za probnu metodu rezanja (jedinica: mm
1. Izmijenite metodu odstupanja za svaki nestandardni alat nakon što je referentni alat ispravio početnu točku.
Koraci za postavljanje alata prikazani su na slici 3.
Nakon grube kalibracije alata, referentni alat bi trebao biti na početku programa. Unesite pomak svakog nestandardnog alata na odgovarajuće mjesto u tablici.
Koristite program O1000 za obradu PhD2xL2 kako biste napravili probni rez.
Zatim izmjerite promjer i duljinu segmentirane rezne osovine, usporedite ih s vrijednošću u naredbenom programu i odredite pogrešku.
Izmijenite početnu točku programa ako je vrijednost MDI pogreške ili pomak veće od MDI vrijednosti pogreške.
5) Dinamički izmijenite vrijednost naredbe O1000 na temelju izmjerenih dimenzija i spremite program. Ponavljajte korake (2) sve dok početni položaj referentnog alata ne bude unutar raspona točnosti. Zabilježite koordinate alatnog stroja za početnu točku ispravljenog programa. Postavite koordinate na nulu.
6) Odaberite O1001 (nož br. 1, br. O1002 (nož br. 3) za svaki probni rez i izmjerite duljinu Li (i=1, 2, 3) i promjer PhDi svakog dijela.
7) Nadoknadite pogreške pomoću metode tablice 3.
Ponavljajte korake 6 do 7 sve dok pogreške obrade ne budu unutar raspona točnosti i dok se referentni alat ne zaustavi na početnoj točki programa i ne pomakne se.
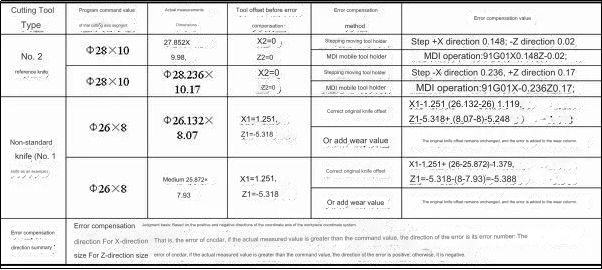
Tablica 3 Primjer kompenzacije pogreške za automatsko probno rezanje cilindričnih segmenata osovine (jedinica: mm).
2. Promjena početne pozicije svakog alata pojedinačno
Načelo postavljanja alata ove metode je da svaki alat prilagođava svoju početnu programsku točku, čime se neizravno usklađuje s istom ishodišnom pozicijom.
Koraci za postavljanje alata prikazani su na slici 3.
Nakon grube kalibracije alata, br. Nakon grube kalibracije alata i snimanja odstupanja, referentni alat br. 2 trebao bi biti na početku programa.
Koraci 2) do (5) prve točne metode postavljanja alata su identični.
Koristite program O1000 za probno rezanje. Izmjerite duljinu Li i promjer PhDi svakog odjeljka.
Alat za postupno pomicanje ili MDI držač alata kompenzira pogreške i prilagođava početnu točku programa svakog alata.
Ponavljajte korake (6) dok početni položaj za svaki nestandardni programski alat ne bude unutar dopuštenog raspona točnosti.
Tablici odstupanja alata može se pristupiti unosom relativnih koordinata prikazanih na CRT-u u stupac X odstupanja i Z odstupanja koji odgovaraju broju odstupanja alata. Ova metoda je prikladna i jednostavna. Ova metoda je jednostavna i praktična.
3. Promijenite sve metode odstupanja za nestandardne alate u istom trenutku nakon izmjene početne pozicije referentnog programa alata.
Metoda je ista kao kod prve precizne metode postavljanja alata. Jedina razlika između ta dva je u tome što se u koraku 7 poziva program O1003 koji istovremeno poziva tri noža (O1004 uklanja No. Program O1003 zamjenjuje odjeljak br. 2 obrade alata. Preostali koraci su identični.
6. Ovom se metodom mogu popraviti četiri noža odjednom
Da biste saznali pogrešku obrade, izmjerite promjer svake sekcije, PhDi, i duljinu svake sekcije, Li (i=2, 1, 4), koristeći metodu relativnog odstupanja alata. Koristite MDI ili korak po korak do držača alata za referentni alat. Izmijenite početnu točku programa. Za nestandardne alate prvo ispravite pomak koristeći izvorni pomak. Zatim unesite novi pomak. Pogreška obrade za referentni alat također se mora unijeti u stupac istrošenosti. Pozovite O1005 program probnog rezanja ako se za kalibraciju alata koristi apsolutni pomak alata. Zatim kompenzirajte pogreške obrade alata u stupcima istrošenosti njihovih odgovarajućih brojeva odstupanja alata.
Kakav utjecaj odabir ispravne metode postavljanja alata za CNC tokarilice ima na kvalitetuCNC obrada dijelova?
Točnost i preciznost:
Alati za rezanje bit će ispravno poravnati ako je alat ispravno postavljen. To izravno utječe na točnost i preciznost u operacijama strojne obrade. Neispravna postavka alata može rezultirati greškama u dimenzijama, lošom završnom obradom površina, pa čak i otpadom.
Dosljednost:
Dosljedne postavke alata osiguravaju ujednačenost operacija strojne obrade i dosljednu kvalitetu u više dijelova. Smanjuje varijacije u površinskoj obradi i dimenzijama te pomaže u održavanju uskih tolerancija.
Životni vijek alata i trošenje alata:
Osiguravajući da je alat pravilno zahvaćen s izratkom, ispravna postavka alata može maksimizirati životni vijek alata. Neodgovarajuće postavke alata mogu rezultirati prekomjernim trošenjem i lomljenjem alata, što će smanjiti vijek trajanja alata.
Produktivnost i učinkovitost
Učinkovite tehnike postavljanja alata mogu smanjiti vrijeme postavljanja stroja i produžiti vrijeme rada. Povećava produktivnost smanjivanjem vremena mirovanja i maksimiziranjem vremena rezanja. To omogućuje brže izmjene alata i smanjuje ukupno vrijeme obrade.
Sigurnost operatera
Na sigurnost rukovatelja može utjecati odabir ispravne metode postavljanja alata. Neke metode poput prepoznavanja slike ili mjerenja laserskim alatom eliminiraju potrebu za ručnim rukovanjem alatima, smanjujući mogućnost ozljeda.
Anebonov cilj je razumjeti izvrsne nedostatke iz proizvodnje i opskrbiti vrhunsku podršku domaćim i inozemnim klijentima svim srcem za 2022. Visokokvalitetni nehrđajući čelik, aluminij, visoka preciznost, izrada po narudžbiCNC tokarenje, Glodanje,cnc rezervni dijeloviza zrakoplovstvo, kako bismo proširili svoje međunarodno tržište, Anebon uglavnom opskrbljuje naše inozemne kupce mehaničkim dijelovima vrhunske kvalitete, glodanim dijelovima i uslugom cnc tokarenja.
Kineska veleprodaja kineskih dijelova strojeva i usluga CNC strojne obrade, Anebon podržava duh "inovacije, harmonije, timskog rada i dijeljenja, staza, pragmatičnog napretka". Dajte nam priliku i mi ćemo dokazati svoju sposobnost. Uz vašu ljubaznu pomoć, Anebon vjeruje da zajedno s vama možemo stvoriti svijetlu budućnost.
Vrijeme objave: 19. listopada 2023