
CNC-tööpinkide seadmete tõhusus on tihedalt seotud nende täpsusega, mistõttu on see ettevõtete jaoks selliste tööriistade hankimisel või arendamisel peamine prioriteet. Enamiku uute tööpinkide täpsus jääb aga tehasest lahkudes sageli alla nõutud standarditele. Lisaks rõhutab mehaanilise sissetöötamise ja kulumise esinemine pikaajalisel kasutamisel üliolulist vajadust reguleerida CNC-tööpinkide täpsust, et tagada optimaalne tootmisvõimsus.
1. Tagasilöögi kompenseerimine
Tagasilöögi leevendamine CNC-tööpinkide sees põhjustavad vead, mis tulenevad iga koordinaattelje etteandeülekandeahelas olevate vedavate komponentide tagurpidi surnud tsoonidest ja iga mehaanilise liikumise ülekandepaari vastupidisest kliirensist, kõrvalekaldeid, kui iga koordinaattelg läheb edasi liikumisest tagurpidi. See kõrvalekalle, mida nimetatakse ka vastupidiseks kliirensiks või hoo kadumiseks, võib poolsuletud ahelaga servosüsteemide kasutamisel oluliselt mõjutada tööpingi positsioneerimistäpsust ja korduvat positsioneerimise täpsust. Lisaks põhjustab aja jooksul kulumisest tingitud kinemaatiliste paaride vahekauguste järkjärguline suurenemine vastupidise kõrvalekalde suurenemist. Seetõttu on tööpingi iga koordinaattelje regulaarne mõõtmine ja pöördhälbe kompenseerimine hädavajalik.

Tagasilöögi mõõtmine
Pöördhälbe hindamiseks alustage koordinaattelje liikumispiirkonnast. Esiteks määrake võrdluspunkt, liigutades määratud vahemaad kas edasi- või tagasisuunas. Pärast seda andke teatud vahemaa läbimiseks samas suunas konkreetne liikumiskäsk. Järgmisena liigutage sama kaugust vastassuunas ja määrake võrdlus- ja peatusasendi vaheline erinevus. Tavaliselt tehakse mitu mõõtmist (sageli seitse) kolmes kohas, mis on kauguse keskpunkti ja mõlema äärmuse lähedal. Seejärel arvutatakse igas asukohas keskmine väärtus, kusjuures pöördhälbe mõõtmiseks kasutatakse nende keskmiste maksimumi. Pöördhälbe väärtuse täpseks määramiseks on oluline mõõtmise ajal liikuda teatud kaugusele.

Lineaarse liikumistelje pöördhälbe hindamisel on tavaline kasutada mõõtevahendina sihverindikaatorit või näidikut. Kui asjaolud lubavad, võib selleks kasutada ka kahesageduslikku laserinterferomeetrit. Mõõtmisel sihverplaadi indikaatori kasutamisel tuleb kindlasti jälgida, et arvesti alus ja vars ei ulatuks liigselt välja, sest pikk konsool mõõtmise ajal võib põhjustada arvesti aluse jõu mõjul nihkumist, mis toob kaasa ebatäpsed näidud ja ebareaalsed kompensatsiooniväärtused.
Programmeerimismeetodi rakendamine mõõtmiseks võib suurendada protsessi mugavust ja täpsust. Näiteks kolme koordinaadiga vertikaalsel tööpingil X-telje pöördhälbe hindamiseks võib protsessi alustada, vajutades arvestit vastu spindli silindrilist pinda, millele järgneb määratud mõõtmisprogrammi käivitamine.
N10G91G01X50F1000; liigutage töölauda paremale
N20X-50;töölaud liigub ülekandevahe kõrvaldamiseks vasakule
N30G04X5; paus vaatluseks
N40Z50; Z-telg tõstetud ja teelt väljas
N50X-50: Töölaud liigub vasakule
N60X50: Töölaud liigub paremale ja lähtestab
N70Z-50: Z-telje lähtestamine
N80G04X5: Paus vaatlemiseks
N90M99;
Oluline on märkida, et mõõdetud tulemused võivad olenevalt töölaua erinevatest töökiirustest erineda. Üldiselt on madalal kiirusel mõõdetud väärtus suurem kui suurel kiirusel, eriti kui tööpingi teljekoormus ja liikumistakistus on olulised. Madalamatel kiirustel liigub töölaud aeglasema tempoga, mille tulemuseks on väiksem ületamise ja üleliikumise tõenäosus ning seega suurem mõõdetud väärtus. Teisest küljest on suurematel kiirustel töölaua kiirema kiiruse tõttu tõenäolisem üle- ja ülesõit, mille tulemuseks on väiksem mõõdetud väärtus. Pöördliikumise telje pöördhälbe mõõtmise meetod järgib lineaarse telje omaga sarnast protsessi, ainsaks erinevuseks on tuvastamiseks kasutatav instrument.

Tagasilöögi kompenseerimine
Paljud riigis valmistatud CNC-tööpingid näitavad positsioneerimistäpsust üle 0,02 mm, kuid neil puudub kompensatsioonivõime. Teatud olukordades saab selliste tööpinkide ühesuunaliseks positsioneerimiseks ja tagasilöögi kõrvaldamiseks kasutada programmeerimistehnikaid. Kuni mehaaniline komponent jääb muutumatuks, on interpolatsiooni töötlemise algatamine teostatav, kui väikese kiirusega ühesuunaline positsioneerimine jõuab interpoleerimise alguspunkti. Kui interpolatsiooni etteande ajal ilmneb vastupidine suund, võib vastupidise kliirensi väärtuse formaalne interpoleerimine suurendada interpolatsiooni töötlemise täpsust ja tõhusalt täitacnc freesitud osataluvusnõuded.
Teiste CNC-tööpinkide puhul on CNC-seadmes tavaliselt määratud mitu mäluaadressi, et salvestada iga telje lõtku väärtus. Kui tööpingi telg on suunatud liikumissuunda muutma, hangib CNC-seade automaatselt telje lõtku väärtuse, mis kompenseerib ja korrigeerib koordinaatide nihke käsu väärtust. See tagab tööpingi täpse positsioneerimise käsupositsioonile ja vähendab pöördhälbe negatiivset mõju tööpingi täpsusele.
Tavaliselt on CNC-süsteemid varustatud ühe saadaoleva lõtku kompensatsiooni väärtusega. Suure ja väikese kiirusega liikumise täpsuse tasakaalustamine ning mehaaniline täiustamine muutub keeruliseks. Veelgi enam, kiire liikumise ajal mõõdetud pöördhälbe väärtust saab kasutada ainult sisendkompensatsiooni väärtusena. Järelikult osutub lõikamise ajal kiire positsioneerimistäpsuse ja interpolatsiooni täpsuse vahelise tasakaalu saavutamine keeruliseks.

CNC-süsteemide jaoks, nagu FANUC0i ja FANUC18i, on kiire liikumise (G00) ja aeglase lõike etteande liikumise (G01) jaoks saadaval kaks lõtku kompenseerimise vormi. Sõltuvalt valitud söötmismeetodist valib ja kasutab CNC-süsteem automaatselt erinevaid kompensatsiooniväärtusi, et saavutada suurem töötlemistäpsus.
Lõike etteande liikumisest G01 saadud lõtku väärtus A tuleks sisestada parameetrisse NO11851 (katsekiirus G01 tuleks määrata tavaliselt kasutatava lõikeetteande kiiruse ja tööpinkide omaduste põhjal), samas kui lõtku väärtus B G00-st tuleb sisestada. parameetrisse NO11852. Oluline on märkida, et kui CNC-süsteem soovib teostada eraldi määratud tagasilöögi kompenseerimist, tuleb parameetri numbri 1800 neljandaks numbriks (RBK) määrata 1; vastasel juhul eraldi määratud tagasilöögi kompenseerimist ei teostata. Vahe kompenseerimine. G02, G03, JOG ja G01 kasutavad sama kompensatsiooniväärtust.

Helikõrguse vigade kompenseerimine
CNC-tööpinkide täpne positsioneerimine hõlmab selle täpsuse hindamist, millega tööpingi liikuvad komponendid CNC-süsteemi juhtimisel ulatuvad. See täpsus mängib üliolulist rolli CNC-tööpinkide eristamisel tavapärastest. Tööpingi geomeetrilise täpsusega joondatud mõjutab see märkimisväärselt lõikamise täpsust, eriti aukude töötlemisel. Aukude puurimise kaldeviga mõjutab oluliselt. CNC-tööpinkide võime hinnata oma töötlemise täpsust sõltub saavutatud positsioneerimistäpsusest. Seetõttu on CNC-tööpinkide positsioneerimistäpsuse tuvastamine ja parandamine töötlemise kvaliteedi tagamiseks olulised meetmed.
Kõrguse mõõtmise protsess
Praegu on tööpinkide hindamise ja käsitsemise peamine meetod kahe sagedusega laserinterferomeetrite kasutamine. Need interferomeetrid töötavad laserinterferomeetria põhimõtetel ja kasutavad mõõtmisel võrdlusalusena laseri reaalajas lainepikkust, suurendades sellega mõõtmise täpsust ja laiendades rakenduste valikut.
Kõrguse tuvastamise protsess on järgmine:
- Paigaldage kahe sagedusega laserinterferomeeter.
- Paigutage optiline mõõteseade piki mõõtmist vajava tööpingi telge.
- Joondage laserpea nii, et mõõtetelg oleks kas paralleelne või kollineaarne tööpingi liikumisteljega, joondades seega optilise tee.
- Sisestage mõõteparameetrid, kui laser saavutab töötemperatuuri.
- Tehke ettenähtud mõõtmisprotseduurid tööpinki liigutades.
- Töötle andmeid ja genereeri tulemusi.
Helikõrguse vea kompenseerimine ja automaatne kalibreerimine
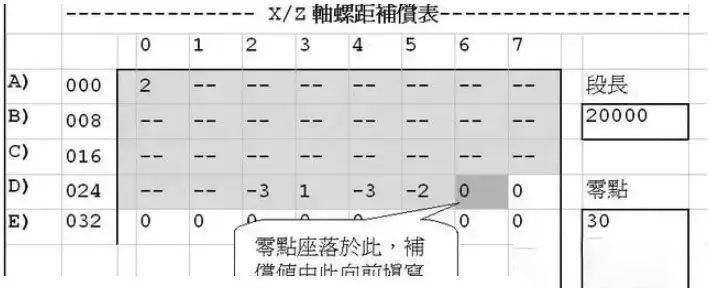
Kui CNC-tööpingi mõõdetud positsioneerimisviga ületab lubatud vahemiku, on vaja viga parandada. Üks levinud lähenemisviis hõlmab sammu vea kompenseerimise tabeli arvutamist ja selle käsitsi sisestamist tööpingi CNC-süsteemi, et positsioneerimisviga parandada. Käsitsi kompenseerimine võib aga olla aeganõudev ja vigu sageli tekitav, eriti kui tegemist on arvukate kompensatsioonipunktidega CNC-tööpingi kolmel või neljal teljel.
Selle protsessi sujuvamaks muutmiseks on välja töötatud lahendus. Ühendades arvuti ja tööpingi CNC-kontrolleri läbi RS232 liidese ning võimendades VB-s loodud automaatse kalibreerimise tarkvara, on võimalik laserinterferomeetrit ja CNC-tööpinki sünkroniseerida. See sünkroniseerimine võimaldab automaatselt tuvastada CNC-tööpinkide positsioneerimistäpsust ja rakendada automaatset sammuvea kompenseerimist. Hüvitismeetod sisaldab:
- CNC juhtimissüsteemis olemasolevate kompensatsiooniparameetrite varukoopia loomine.
- Tööpingi CNC programmi genereerimine punkt-punkti positsioneerimise täpsuse mõõtmiseks arvuti abil, mis seejärel edastatakse CNC süsteemi.
- Iga punkti positsioneerimisvea automaatne mõõtmine.
- Uue kompensatsiooniparameetrite komplekti genereerimine etteantud kompensatsioonipunktide alusel ja nende edastamine CNC-süsteemi automaatseks helikõrguse kompenseerimiseks.
- Korduv täpsuse kontrollimine.
Nende spetsiifiliste lahenduste eesmärk on suurendada CNC-tööpinkide täpsust. Sellegipoolest on oluline märkida, et erinevate CNC-tööpinkide täpsus võib erineda. Seetõttu tuleks tööpingid kalibreerida vastavalt nende individuaalsetele asjaoludele.
Kui tööpingil veakompensatsiooni ei tehta, siis millist mõju avaldab see toodetavatele CNC osadele?
Kui tööpingil jäetakse veakompensatsioon tähelepanuta, võib see põhjustada lahknevusi tööpingisCNC osadtoodetud. Näiteks kui tööpingil on reguleerimata positsioneerimisviga, võib tööriista või tooriku tegelik asend erineda CNC programmis määratud programmeeritud asendist, mis toob kaasa mõõtmete ebatäpsusi ja geomeetrilisi vigu toodetud detailides.
Näiteks kui CNC-freespingil on X-teljel reguleerimata positsioneerimisviga, võivad töödeldava detaili freesitud pilud või augud olla valesti joondatud või valede mõõtmetega. Samamoodi võivad treipingi töös reguleerimata positsioneerimisvead põhjustada treitud detailide läbimõõdu või pikkuse ebatäpsusi. Need lahknevused võivad põhjustada nõuetele mittevastavaid osi, mis ebaõnnestuvad
Anebon teeb iga raske töö, et saada suurepäraseks ja suurepäraseks, ning kiirendab meie meetmeid, et tõusta kontinentidevaheliste tipptasemel ja kõrgtehnoloogiliste ettevõtete seast Hiina kullatarnija jaoks originaalseadmete tootjate jaoks, kohandatudcnc-töötlusteenus, Lehtmetalli valmistamise teenus, freesimisteenused. Anebon teeb teie isikupärastatud ostu, et rahuldada teie endi rahuldust! Aneboni ettevõte loob mitu osakonda, sealhulgas väljundosakond, tuluosakond, suurepärane juhtimisosakond ja teeninduskeskus jne.
Tehase tarnimine HiinaTäppisosa ja alumiiniumosa, Võite Anebonile teada anda oma ideest töötada välja oma mudeli jaoks ainulaadne disain, et vältida liiga palju sarnaseid osi turul! Pakume oma parimat teenust, et rahuldada kõik teie vajadused! Ärge unustage Aneboniga kohe ühendust võtta!
Postitusaeg: jaan-09-2024