
La efikeco de CNC-maŝino-ila ekipaĵo estas proksime ligita al sia precizeco, igante ĝin ŝlosila prioritato por kompanioj kiam ili akiras aŭ disvolvas tiajn ilojn. Tamen, la precizeco de la plej multaj novaj maŝiniloj ofte mankas al la postulataj normoj post forlasado de la fabriko. Aldone, la apero de mekanika eniro kaj eluziĝo dum longedaŭra uzo emfazas la esencan bezonon por ĝustigi la precizecon de CNC-maŝinoj por certigi optimuman produktan rendimenton.
1. Kontraŭreaga kompenso
Mildigado de KontraŭreagoEne de CNC-maŝinoj, eraroj devenantaj de la inversaj mortaj zonoj de la veturantaj komponentoj sur la nutra transdono ĉeno de ĉiu koordinata akso kaj la inversa senigo de ĉiu mekanika mova transdono paro kondukas al devioj kiam ĉiu koordinata akso transiras de antaŭen al inversa moviĝo. Ĉi tiu devio, ankaŭ konata kiel inversa senigo aŭ perdita impeto, povas signife efiki la poziciiga precizeco kaj ripetema poziciiga precizeco de la maŝinilo kiam duonfermitaj buklaj servosistemoj estas utiligitaj. Krome, la laŭpaŝa pliiĝo en kinemataj parsenigoj pro eluziĝo dum tempo kondukas al ekvivalenta pliiĝo en inversa devio. Tial, regula mezurado kaj kompenso por la inversa devio de ĉiu koordinata akso de la maŝinilo estas nepraj.

Mezurado de Kontraŭreago
Por taksi inversan devion, komencu ene de la vojaĝa gamo de la koordinata akso. Unue, starigu referencpunkton movante fiksitan distancon aŭ en la antaŭen aŭ inversan direkton. Sekvante ĉi tion, eligu specifan movan komandon en la sama direkto por kovri certan distancon. Poste, movu la saman distancon en la kontraŭa direkto kaj determini la variancon inter la referenco kaj haltaj pozicioj. Tipe, multoblaj mezuradoj (ofte sep) estas faritaj ĉe tri lokoj proksime de la mezpunkto kaj ambaŭ ekstremaĵoj de la vojaĝintervalo. La meza valoro tiam estas kalkulita ĉe ĉiu loko, kun la maksimumo inter tiuj mezumoj utiligita kiel la mezurado por inversa devio. Estas esence movi specifan distancon dum mezuradoj por precize determini la inversan deviovaloron.

Dum taksado de la inversa devio de linia moviĝakso, estas ofte utiligi ciferindikilon aŭ cifermezurilon kiel la mezurilon. Se cirkonstancoj permesas, duoble-frekvenca laserinterferometro ankaŭ povas esti utiligita por tiu celo. Kiam oni uzas cifer-indikilon por mezuradoj, estas esence certigi, ke la metrobazo kaj tigo ne etendas troe, ĉar longa kantilevro dum mezurado povas igi la mezurbazon moviĝi pro forto, kondukante al malprecizaj valoroj kaj nerealismaj kompensaj valoroj.
Efektivigi programan metodon por mezurado povas plibonigi la oportunon kaj precizecon de la procezo. Ekzemple, por taksi la inversan devion de la X-akso sur tri-koordinata vertikala maŝinilo, la procezo povas komenci premante la mezurilon kontraŭ la cilindra surfaco de la spindelo, sekvita per funkciado de elektita programo por mezurado.
N10G91G01X50F1000; movu la laborbenkon dekstren
N20X-50;la labortablo moviĝas maldekstren por elimini la transdonon
N30G04X5; paŭzo por observado
N40Z50; Z-akso levita kaj ekster la vojo
N50X-50: Labortablo moviĝas maldekstren
N60X50: Labortablo moviĝas dekstren kaj rekomenciĝas
N70Z-50: Z-akso rekomencigita
N80G04X5: Paŭzo por observado
N90M99;
Gravas noti, ke la mezuritaj rezultoj povas varii laŭ malsamaj operaciaj rapidoj de la laborbenko. Ĝenerale, la mezurita valoro ĉe malalta rapido estas pli granda ol tiu ĉe alta rapido, precipe kiam la maŝinila aksoŝarĝo kaj moviĝrezisto estas grandaj. Je pli malaltaj rapidecoj, la labortablo moviĝas je pli malrapida rapideco, rezultigante malpli verŝajnecon de superpaĝo kaj trovojaĝo, tial donante pli altan mezuran valoron. Aliflanke, ĉe pli altaj rapidecoj, preterpaso kaj trovojaĝado pli okazas supozeble pro la pli rapida labortablorapideco, rezultigante pli malgrandan mezuran valoron. La mezuraliro por la inversa devio de la rotacia moviĝakso sekvas similan procezon al tiu de la linia akso, kie la nura diferenco estas la instrumento uzita por detekto.

Kompensante por Kontraŭreago
Multnombraj CNC-maŝinaj iloj faritaj en la lando elmontras pozician precizecon de pli ol 0.02mm, tamen mankas la kapableco por kompenso. En certaj situacioj, programaj teknikoj povas esti utiligitaj por plenumi unudirektan poziciigadon kaj elimini kontraŭreagon por tiaj maŝiniloj. Tiel longe kiel la mekanika komponento restas senŝanĝa, iniciati interpolpretigon estas realigebla post kiam la malalt-rapida, unudirekta poziciigado atingas la deirpunkton por interpolado. Kiam vi renkontas inversan direkton dum interpola nutrado, formale interpolado de la inversa sepa valoro havas la eblecon plibonigi la precizecon de interpola prilaborado kaj efike renkonti lacnc muelita partola toleremaj postuloj.
Por aliaj varioj de CNC-maŝinoj, multoblaj memoradresoj en la CNC-aparato estas tipe indikitaj por stoki la kontraŭreagvaloron de ĉiu akso. Kiam akso de la maŝinilo estas direktita por ŝanĝi sian movan direkton, la CNC-aparato aŭtomate reakiros la kontraŭreagan valoron de la akso, kiu kompensas kaj korektas la komandan valoron de koordinata movo. Ĉi tio certigas, ke la maŝinilo povas esti precize poziciigita ĉe la komanda pozicio kaj mildigas la malfavoran efikon de inversa devio sur la precizeco de la maŝinilo.
Tipe, CNC-sistemoj estas ekipitaj per ununura disponebla kontraŭreaga kompensvaloro. Ekvilibro de alta kaj malalt-rapida movprecizeco, same kiel trakti mekanikan plibonigon, fariĝas malfacila. Krome, la inversa deviovaloro mezurita dum rapida moviĝo povas nur esti utiligita kiel la eniga kompensvaloro. Sekve, atingi ekvilibron inter rapida poziciiga precizeco kaj interpola precizeco dum tranĉado pruvas esti malfacila.

Por CNC-sistemoj kiel FANUC0i kaj FANUC18i, ekzistas du disponeblaj formoj de kontraŭreaga kompenso por rapida moviĝo (G00) kaj malrapida tranĉa nutraĵmoviĝo (G01). Depende de la elektita nutra metodo, la CNC-sistemo aŭtomate elektas kaj utiligas apartajn kompensajn valorojn por atingi plibonigitan pretigan precizecon.
La kontraŭreaga valoro A, akirita de G01-tranĉa nutra moviĝo, devus esti enigita en la parametron NO11851 (la G01-provrapideco devus esti determinita surbaze de la ofte uzataj tranĉa furaĝrapideco kaj maŝiniloj-karakterizaĵoj), dum la kontraŭreaga valoro B de G00 devas esti enigita. en la parametron NO11852. Gravas noti, ke se la CNC-sistemo serĉas ekzekuti aparte specifitan inversan kontraŭreagan kompenson, la kvara cifero (RBK) de parametro numero 1800 devas esti agordita al 1; alie, aparte specifita inversa kontraŭreaga kompenso ne estos efektivigita. Gap-kompenso. G02, G03, JOG, kaj G01 ĉiuj utiligas la saman kompensvaloron.

Kompenso por Tonalaj Eraroj
La precizeca poziciigado de CNC-maŝinoj implikas la taksadon de la precizeco, per kiu la moveblaj komponantoj de la maŝinilo povas atingi sub la komando de la CNC-sistemo. Ĉi tiu precizeco ludas decidan rolon en distingi CNC-maŝinojn de konvenciaj. Akordigita kun la geometria precizeco de la maŝinilo, ĝi signife influas la tranĉan precizecon, precipe en trua maŝinado. La tonalteraro en truoborado havas grandan efikon. La kapablo de CNC-maŝino ilo taksi ĝian pretigan precizecon dependas de la atingita poziciiga precizeco. Tial, la detekto kaj korekto de la poziciiga precizeco de CNC-maŝinoj estas esencaj mezuroj por certigi pretigan kvaliton.
Procezo de Mezurado de Tonalto
Nuntempe, la primara metodo por taksado kaj pritraktado de maŝiniloj estas la uzo de dufrekvencaj laserinterferometroj. Ĉi tiuj interferometroj funkcias laŭ la principoj de laserinterferometrio kaj utiligas la realtempan laseran ondolongon kiel la referencon por mezurado, tiel plibonigante mezuran precizecon kaj vastigante la gamon de aplikoj.
La procezo por detekti tonalto estas kiel sekvas:
- Instalu la dufrekvencan laserinterferometron.
- Metu optikan mezuran aparaton laŭ la akso de la maŝinilo, kiu postulas mezuradon.
- Vicigu la laseran kapon por certigi, ke la mezurado estas aŭ paralela aŭ kolineara kun la movada akso de la maŝinilo, tiel antaŭ-vicigante la optikan vojon.
- Enigu la mezurajn parametrojn post kiam la lasero atingas sian funkcian temperaturon.
- Efektivigu la preskribitajn mezurajn procedurojn movante la maŝinilon.
- Prilaboru la datumojn kaj generu la rezultojn.
Tonalto-Era Kompenso kaj Aŭtomata Kalibrado
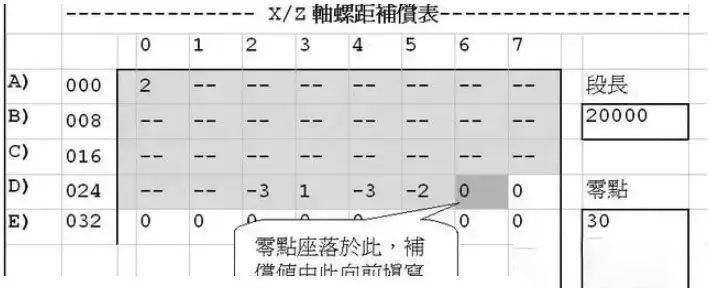
Kiam la mezurita poziciiga eraro de CNC-maŝino ilo superas la permeseblan gamon, necesas korekti la eraron. Unu ĝenerala aliro implikas komputi la tonalt-eraran kompenstabelon kaj mane enigi ĝin en la CNC-sistemon de la maŝinilo por ĝustigi la pozician eraron. Tamen, mana kompenso povas esti tempopostula kaj inklina al eraroj, precipe kiam oni traktas multajn kompenspunktojn trans tri aŭ kvar aksoj de la CNC-maŝino ilo.
Por plifaciligi ĉi tiun procezon, solvo estis evoluigita. Ligante la komputilon kaj la CNC-regilon de la maŝinilo per la interfaco RS232 kaj utiligante aŭtomatan kalibran programaron kreitan en VB, eblas sinkronigi la laseran interferometron kaj la CNC-maŝinon. Ĉi tiu sinkronigado ebligas la aŭtomatan detekton de la poziciiga precizeco de la CNC-maŝino ilo kaj la efektivigon de aŭtomata kompenso de eraro de tonalto. La metodo de kompenso inkluzivas:
- Kreante sekurkopion de la ekzistantaj kompensaj parametroj en la CNC-kontrolsistemo.
- Generante maŝinilon CNC-programon por punkto-post-punkta poziciiga precizeca mezurado uzante la komputilon, kiu tiam estas transdonita al la CNC-sistemo.
- Aŭtomate mezurado de la poziciiga eraro de ĉiu punkto.
- Generante novan aron de kompensaj parametroj bazitaj sur la antaŭdestinitaj kompenspunktoj kaj transdoni ilin al la CNC-sistemo por aŭtomata tonalto-kompenso.
- Kontrolante la precizecon ree.
Ĉi tiuj specifaj solvoj celas plibonigi la precizecon de CNC-maŝinoj. Tamen, estas esence noti, ke la precizeco de malsamaj CNC-maŝinoj povas varii. Kiel rezulto, maŝiniloj devas esti kalibritaj laŭ siaj individuaj cirkonstancoj.
Se erarkompenso ne estas farita sur la maŝinilo, kian efikon ĝi havos sur la CNC-partoj produktitaj?
Se erarkompenso estas preteratentita sur maŝinilo, ĝi povas rezultigi diferencojn en laCNC-partojfabrikita. Ekzemple, se la maŝinilo havas neĝustigitan poziciigi eraron, la vera pozicio de la ilo aŭ laborpeco povas deturni de la programita pozicio precizigita en la CNC-programo, kondukante al dimensiaj eraroj kaj geometriaj eraroj en la produktitaj partoj.
Ekzemple, se CNC-frezmaŝino havas neĝustigitan poziciigantan eraron en la X-akso, la muelitaj fendoj aŭ truoj en la laborpeco povas esti misalignitaj aŭ havi malĝustajn grandecojn. Simile, en torniloperacio, neĝustigitaj poziciigi eraroj povis kaŭzi malprecizaĵojn en la diametro aŭ longo de turnitaj partoj. Tiuj diferencoj povas konduki al nekonformaj partoj kiuj malsukcesas
Anebon faros ĉiun malfacilan laboron fariĝi bonega kaj bonega, kaj akcelos niajn mezurojn por stari el la rango de interkontinentaj altnivelaj kaj altteknologiaj entreprenoj por Ĉina Ora Provizanto por OEM, Propra.cnc-maŝinservo, Lado-fabrika servo, muelaj servoj. Anebon faros vian personigitan aĉeton por renkonti vian propran kontentigan! La komerco de Anebon starigas plurajn fakojn, inkluzive de produktadsekcio, enspeza sekcio, bonega kontrolsekcio kaj servocentro, ktp.
Fabriko Provizo ĈinioPreciza Parto kaj Aluminia Parto, Vi povas sciigi Anebon vian ideon evoluigi unikan dezajnon por via propra modelo por malhelpi tro da similaj partoj en la merkato! Ni donos nian plej bonan servon por kontentigi ĉiujn viajn bezonojn! Memoru kontakti Anebon tuj!
Afiŝtempo: Jan-09-2024