
CNC staklių įrangos efektyvumas yra glaudžiai susijęs su jos tikslumu, todėl tai yra pagrindinis įmonių prioritetas perkant ar kuriant tokius įrankius. Tačiau daugumos naujų staklių tikslumas dažnai neatitinka reikalaujamų standartų išėjus iš gamyklos. Be to, dėl mechaninio įvažiavimo ir susidėvėjimo ilgo naudojimo metu pabrėžiamas gyvybiškai svarbus poreikis reguliuoti CNC staklių tikslumą, kad būtų užtikrintas optimalus gamybos našumas.
1. Atlenkimo kompensavimas
CNC staklių atstumų mažinimas, klaidos, atsirandančios dėl kiekvienos koordinačių ašies tiekimo perdavimo grandinėje esančių varomųjų komponentų atvirkštinės negyvosios zonos ir kiekvienos mechaninio judesio perdavimo poros atvirkštinio atstumo, lemia nukrypimus, kai kiekviena koordinačių ašis pereina iš pirmyn į atgalinį judėjimą. Šis nuokrypis, taip pat žinomas kaip atvirkštinis tarpas arba prarastas impulsas, gali labai paveikti staklių padėties nustatymo tikslumą ir pasikartojančio padėties nustatymo tikslumą, kai naudojamos pusiau uždaros kilpos servo sistemos. Be to, laipsniškas kinematinių porų tarpų padidėjimas dėl susidėvėjimo laikui bėgant atitinkamai padidina atvirkštinį nuokrypį. Todėl būtina reguliariai matuoti ir kompensuoti kiekvienos staklių koordinačių ašies atvirkštinį nuokrypį.

Atgalinės reakcijos matavimas
Norėdami įvertinti atvirkštinį nuokrypį, pradėkite nuo koordinačių ašies judėjimo diapazono. Pirmiausia nustatykite atskaitos tašką judindami nustatytą atstumą pirmyn arba atgal. Po to išduokite konkrečią judėjimo komandą ta pačia kryptimi, kad įveiktumėte tam tikrą atstumą. Tada pereikite prie to paties atstumo priešinga kryptimi ir nustatykite nuokrypį tarp atskaitos ir sustojimo padėčių. Paprastai keli matavimai (dažnai septyni) atliekami trijose vietose, esančiose netoli vidurio taško ir abiejų kelionės diapazono kraštutinių taškų. Tada kiekvienoje vietoje apskaičiuojama vidutinė vertė, o didžiausia iš šių vidurkių naudojama kaip atvirkštinio nuokrypio matavimas. Norint tiksliai nustatyti atvirkštinio nuokrypio vertę, matavimų metu būtina perkelti tam tikrą atstumą.

Vertinant tiesinio judėjimo ašies atvirkštinį nuokrypį, įprasta naudoti ciferblato indikatorių arba matuoklį kaip matavimo įrankį. Jei aplinkybės leidžia, šiam tikslui galima naudoti ir dviejų dažnių lazerinį interferometrą. Matavimams naudojant ciferblato indikatorių, būtina užtikrinti, kad skaitiklio pagrindas ir stiebas pernelyg neišsikištų, nes dėl ilgos konsolės matavimo metu skaitiklio pagrindas dėl jėgos gali pasislinkti, o tai lemia netikslius rodmenis ir nerealias kompensavimo vertes.
Matavimo programavimo metodo įgyvendinimas gali padidinti proceso patogumą ir tikslumą. Pavyzdžiui, norint įvertinti atvirkštinį X ašies nuokrypį trijų koordinačių vertikalioje staklėje, procesas gali prasidėti prispaudžiant matuoklį prie veleno cilindrinio paviršiaus, o po to paleidžiant paskirtą matavimo programą.
N10G91G01X50F1000; perkelkite darbastalį į dešinę
N20X-50;darbo stalas pasislenka į kairę, kad būtų pašalintas perdavimo tarpas
N30G04X5; pauzė stebėjimui
N40Z50; Z ašis pakelta ir nepalikta
N50X-50: darbastalis juda į kairę
N60X50: Darbastalis juda į dešinę ir nustatomas iš naujo
N70Z-50: Z ašies nustatymas iš naujo
N80G04X5: Pauzė stebėjimui
N90M99;
Svarbu pažymėti, kad išmatuoti rezultatai gali skirtis, atsižvelgiant į skirtingus darbastalio veikimo greičius. Paprastai išmatuota vertė esant mažam greičiui yra didesnė nei esant dideliam greičiui, ypač kai staklių ašies apkrova ir pasipriešinimas judėjimui yra dideli. Esant mažesniam greičiui, darbo stalas juda lėčiau, todėl mažesnė tikimybė viršyti ir pervažiuoti, todėl gaunama didesnė išmatuota vertė. Kita vertus, važiuojant didesniu greičiu, dėl didesnio darbo stalo greičio didesnė tikimybė, kad viršijimas ir viršijimas įvyks, todėl išmatuota vertė yra mažesnė. Sukamojo judesio ašies atvirkštinio nuokrypio matavimo metodas yra panašus į linijinės ašies metodą, o vienintelis skirtumas yra aptikimui naudojamas prietaisas.

Atgalinės reakcijos kompensavimas
Daugelio šalyje pagamintų CNC staklių padėties nustatymo tikslumas yra didesnis nei 0,02 mm, tačiau jiems trūksta kompensavimo galimybių. Tam tikrose situacijose galima naudoti programavimo metodus, kad būtų galima atlikti vienpusį padėties nustatymą ir pašalinti tokių staklių atstūmimą. Tol, kol mechaninis komponentas lieka nepakitęs, interpoliacijos apdorojimo inicijavimas yra įmanomas, kai mažo greičio, vienpusio padėties nustatymas pasiekia interpoliacijos pradžios tašką. Kai interpoliacijos padavimo metu susiduriama su atvirkštine kryptimi, formaliai interpoliuojant atvirkštinio atstumo vertę, gali padidėti interpoliacijos apdorojimo tikslumas ir veiksmingai atitikticnc frezuota dalistolerancijos reikalavimus.
Kitų tipų CNC staklių atveju keli atminties adresai CNC įrenginyje paprastai yra skirti kiekvienos ašies laisvumo reikšmei saugoti. Kai staklių ašis nukreipiama keisti judėjimo kryptį, CNC įrenginys automatiškai nuskaitys ašies laisvumo vertę, kuri kompensuoja ir ištaiso koordinačių poslinkio komandos reikšmę. Tai užtikrina, kad staklės gali būti tiksliai išdėstytos komandinėje padėtyje ir sumažinamas neigiamas atvirkštinio nuokrypio poveikis staklių tikslumui.
Paprastai CNC sistemos yra aprūpintos viena turima blyksnio kompensavimo verte. Subalansuoti didelio ir mažo greičio judesio tikslumą, taip pat spręsti mechaninio tobulinimo problemą tampa sudėtinga. Be to, greito judėjimo metu išmatuota atvirkštinio nuokrypio vertė gali būti naudojama tik kaip įvesties kompensavimo vertė. Todėl pjovimo metu sunku pasiekti pusiausvyrą tarp greito padėties nustatymo tikslumo ir interpoliacijos tikslumo.

CNC sistemoms, tokioms kaip FANUC0i ir FANUC18i, yra dvi galimos blyksnio kompensavimo formos greitam judesiui (G00) ir lėtam pjovimo padavimo judesiui (G01). Priklausomai nuo pasirinkto padavimo metodo, CNC sistema automatiškai parenka ir naudoja skirtingas kompensavimo reikšmes, kad padidintų apdorojimo tikslumą.
Atgalinio laisvumo vertė A, gauta iš G01 pjovimo pastūmos judesio, turi būti įvesta į parametrą NO11851 (bandomasis G01 greitis turi būti nustatytas pagal dažniausiai naudojamą pjovimo pastūmos greitį ir staklių charakteristikas), o laisvo laisvumo vertę B iš G00 reikia įvesti. į parametrą NO11852. Svarbu pažymėti, kad jei CNC sistema siekia atlikti atskirai nurodytą atvirkštinio laisvumo kompensavimą, parametro numerio 1800 ketvirtasis skaitmuo (RBK) turi būti nustatytas į 1; kitu atveju atskirai nurodyta atvirkštinio laisvumo kompensacija nebus vykdoma. Spragų kompensavimas. G02, G03, JOG ir G01 naudoja tą pačią kompensavimo vertę.

Kompensacija už žingsnio klaidas
Tikslus CNC staklių padėties nustatymas apima tikslumo, kuriuo judantys staklių komponentai gali pasiekti pagal CNC sistemą, įvertinimą. Šis tikslumas vaidina lemiamą vaidmenį skiriant CNC stakles nuo įprastų. Suderintas su geometriniu staklių tikslumu, jis daro didelę įtaką pjovimo tikslumui, ypač apdirbant skyles. Žingsnio paklaida gręžiant skyles turi didelę įtaką. CNC staklių gebėjimas įvertinti jo apdorojimo tikslumą priklauso nuo pasiekto padėties nustatymo tikslumo. Todėl CNC staklių padėties nustatymo tikslumo aptikimas ir ištaisymas yra esminės priemonės apdorojimo kokybei užtikrinti.
Žingsnio matavimo procesas
Šiuo metu pagrindinis staklių įvertinimo ir tvarkymo metodas yra dviejų dažnių lazerinių interferometrų naudojimas. Šie interferometrai veikia pagal lazerinės interferometrijos principus ir naudoja realaus laiko lazerio bangos ilgį kaip atskaitos tašką, taip padidindami matavimo tikslumą ir išplečiant pritaikymo spektrą.
Pikio aptikimo procesas yra toks:
- Įdiekite dviejų dažnių lazerinį interferometrą.
- Pastatykite optinį matavimo prietaisą išilgai staklių ašies, kurią reikia išmatuoti.
- Sulygiuokite lazerio galvutę taip, kad matavimo ašis būtų lygiagreti arba vienalytė su staklių judėjimo ašimi, taip iš anksto sulygiuodami optinį kelią.
- Įveskite matavimo parametrus, kai lazeris pasiekia savo darbinę temperatūrą.
- Atlikite nurodytas matavimo procedūras judindami stakles.
- Apdorokite duomenis ir generuokite rezultatus.
Žingsnio klaidų kompensavimas ir automatinis kalibravimas
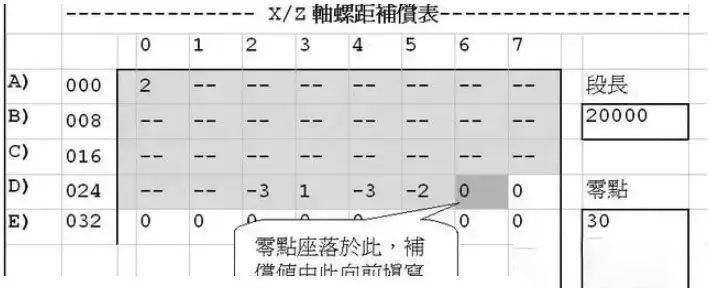
Kai išmatuota CNC staklių padėties nustatymo paklaida viršija leistiną diapazoną, reikia ištaisyti klaidą. Vienas iš paplitusių metodų apima žingsnio paklaidos kompensavimo lentelės apskaičiavimą ir rankinį jos įvedimą į staklių CNC sistemą, kad būtų ištaisyta padėties nustatymo klaida. Tačiau rankinis kompensavimas gali atimti daug laiko ir sukelti klaidų, ypač kai dirbama su daugybe kompensavimo taškų trijose ar keturiose CNC staklių ašyse.
Siekiant supaprastinti šį procesą, buvo sukurtas sprendimas. Sujungus kompiuterį ir staklių CNC valdiklį per RS232 sąsają ir panaudojus VB sukurtą automatinio kalibravimo programinę įrangą, galima sinchronizuoti lazerinį interferometrą ir CNC stakles. Šis sinchronizavimas leidžia automatiškai aptikti CNC staklių padėties nustatymo tikslumą ir įdiegti automatinį žingsnio paklaidos kompensavimą. Kompensacijos metodas apima:
- Esamų kompensavimo parametrų atsarginės kopijos kūrimas CNC valdymo sistemoje.
- Staklių CNC programos generavimas taškiniam padėties nustatymo tikslumo matavimui naudojant kompiuterį, kuri vėliau perduodama į CNC sistemą.
- Automatiškai išmatuoja kiekvieno taško padėties nustatymo paklaidą.
- Naujo kompensavimo parametrų rinkinio generavimas pagal iš anksto nustatytus kompensavimo taškus ir jų perdavimas į CNC sistemą automatiniam žingsnio kompensavimui.
- Pakartotinai tikrinamas tikslumas.
Šiais specifiniais sprendimais siekiama padidinti CNC staklių tikslumą. Nepaisant to, būtina pažymėti, kad skirtingų CNC staklių tikslumas gali skirtis. Dėl to staklės turėtų būti kalibruojamos atsižvelgiant į jų individualias aplinkybes.
Jei staklėje neatliekamas klaidų kompensavimas, kokią įtaką tai turės gaminamoms CNC detalėms?
Jei staklėje nepaisoma klaidų kompensavimo, gali atsirasti neatitikimųCNC dalyspagaminti. Pavyzdžiui, jei staklėje yra nesureguliuota padėties paklaida, tikroji įrankio ar ruošinio padėtis gali skirtis nuo CNC programoje nurodytos užprogramuotos padėties, todėl pagamintose dalyse gali atsirasti matmenų netikslumų ir geometrinių klaidų.
Pavyzdžiui, jei CNC frezavimo staklės turi nesureguliuotą padėties nustatymo paklaidą X ašyje, ruošinio frezuoti grioveliai arba skylės gali būti neteisingai išlygiuoti arba turėti neteisingus matmenis. Panašiai, atliekant tekinimo stakles, nesureguliuotos padėties nustatymo klaidos gali sukelti suktų dalių skersmens ar ilgio netikslumus. Dėl šių neatitikimų gali atsirasti reikalavimų neatitinkančių dalių, kurios suges
„Anebonas“ privers kiekvieną sunkų darbą, kad taptų puiku ir puikiu, ir paspartins mūsų priemones, siekdami išsiskirti iš tarpžemyninių aukščiausios klasės ir aukštųjų technologijų įmonių, skirtų Kinijos aukso tiekėjui OĮG, pagal užsakymą.cnc apdirbimo paslauga, Metalo lakštų gamybos paslaugos, frezavimo paslaugos. „Anebon“ atliks jūsų asmeninį pirkimą, kad patenkintų jūsų poreikius! „Anebon“ įmonė įsteigia kelis skyrius, įskaitant gamybos skyrių, pajamų skyrių, puikų valdymo skyrių ir paslaugų centrą ir kt.
Gamyklos tiekimas KinijojeTikslioji dalis ir aliuminio dalis, Galite pranešti Anebon apie savo idėją sukurti unikalų savo modelio dizainą, kad rinkoje nepatektų per daug panašių dalių! Mes suteiksime geriausias paslaugas, kad patenkintume visus jūsų poreikius! Nepamirškite nedelsiant susisiekti su Anebon!
Paskelbimo laikas: 2024-01-09