
Ar žinote, kiek būdų yra tiksliai nustatyti įrankius CNC tekinimo staklėse?
Jutiklinio zondo metodas: - Šis metodas naudoja zondą, kuris liečia įrankį, kad išmatuotų jo padėtį mašinos atskaitos taško atžvilgiu. Jis pateikia tikslius duomenis apie įrankio skersmenį ir ilgį.
Įrankio išankstinis nustatymas:Įrankio išankstinio nustatymo įtaisas naudojamas įrankio matmenims matuoti už mašinos ribų. Šis metodas leidžia greitai ir tiksliai nustatyti įrankį.
Įrankio poslinkio metodas:– Šiuo metodu operatorius matuoja įrankio ilgį ir skersmenį naudodamas tokius įrankius kaip suportai ir mikrometrai. Tada vertės įvedamos į mašinos valdymo sistemą.
Lazerinio įrankio matavimas:Įrankio matmenims nustatyti ir matuoti naudojamos lazerinės sistemos. Projektuodami lazerio šviesos spindulį ant įrankio pjovimo briaunos, jie pateikia tikslius ir greitus įrankio duomenis.
Vaizdo atpažinimo metodas:Pažangios kompiuterinės sistemos gali naudoti vaizdo atpažinimo technologiją automatiškai apskaičiuoti įrankio matmenis. Jie tai daro fotografuodami įrankį, analizuodami jo savybes ir tada apskaičiuodami matavimus.
Tai labai naudingas straipsnis. Straipsnyje pirmiausia pristatomi „bandomojo pjovimo įrankių nustatymo metodo“, kuris dažniausiai naudojamas su CNC tekinimo staklėmis, principai ir idėjos. Tada pristatomi keturi rankiniai CNC tekinimo sistemų bandomųjų pjovimo įrankių nustatymo metodai. Siekiant pagerinti įrankio nustatymų tikslumą, buvo sukurtas programa valdomas automatinis bandomasis pjovimo metodas, pagrįstas „automatiniu pjovimu – matavimu – klaidų kompensavimu“. Taip pat buvo apibendrinti keturi tikslūs įrankių nustatymo metodai.
1. CNC tekinimo staklių įrankių nustatymo metodo principas ir idėjos
Suprasti CNC tekinimo staklių įrankių nustatymo principus svarbu operatoriams, norintiems turėti aiškių idėjų apie įrankių nustatymą, įsisavinti įrankių nustatymo operacijas ir siūlyti naujus metodus. Įrankio nustatymas – tai ruošinio koordinačių sistemos pradinės padėties nustatymas, kuris keičiasi programuojant staklių koordinačių sistemą. Įrankio nustatymas apima atskaitos įrankio programos pradžios taško mašinos koordinačių gavimą ir įrankio poslinkio, palyginti su tuo įrankiu, nustatymą.
Šios sąvokos naudojamos norint pademonstruoti sąvokas ir idėjas, susijusias su įrankių nustatymu naudojant bandomąjį pjovimo metodą. Naudokite Hua Medieval Star Teaching Turning System (programinės įrangos versijos numeris 5.30); naudokite ruošinio dešiniojo galinio paviršiaus centrą programos pradžiai ir nustatykite jį naudodami komandą G92. Skersmens programavimas, programos pradžios taško H ruošinio koordinatės yra (100,50); įdėkite keturis įrankius ant įrankių laikiklio. Įrankis Nr. 1 yra 90 laipsnių grubaus tekinimo įrankis, o Nr. 2 pamatinis įrankis yra 90 laipsnių išorinio apskritimo smulkus tekinimo įrankis. peilis, Nr. Nr. 4-asis peilis yra trikampis srieginis peilis su 60 laipsnių kampu (straipsnyje pateikti pavyzdžiai yra vienodi).
Įrankio nustatymui naudojamos „staklių“ koordinatės. Kaip parodyta 1 paveiksle, etaloninis įrankis „rankiniu būdu nupjauna išorinį apskritimą ir ruošinio galinį paviršių bei ekrane įrašo XZ staklių koordinates. Staklių koordinatės programos kilmei O gaunamos iš ryšio tarp staklių koordinačių taškuose A ir O: XO=XA – Phd, ZO=ZA. Naudodami ruošinio H koordinates taško O atžvilgiu (100,50), galiausiai galime išvesti taško H staklių koordinates: XH=100 – Phd, ZH=ZA+50. Ši ruošinio koordinačių sistema pagrįsta įrankio antgalio padėtimi ant etaloninio įrankio.
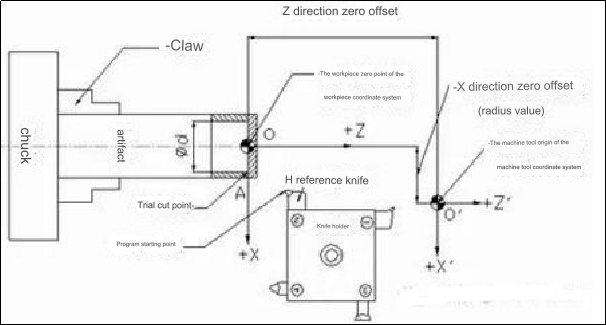
1 pav. Rankinio bandomojo pjovimo ir įrankių nustatymų schema
2 paveiksle poslinkis tarp taško A ir įrankio antgalio B atsiranda dėl įrankių, įspaustų į įrankio laikiklį, išplėtimo ir padėties skirtumų X ir Z kryptimis. Pradinė ruošinio koordinačių sistema nebegalioja. Be to, kiekvienas įrankis naudojimo metu susidėvės skirtingai. Todėl kiekvieno įrankio įrankio poslinkiai ir nusidėvėjimo vertės turi būti kompensuojamos.
Norint nustatyti įrankio poslinkį, kiekvienas įrankis turi būti sulygiuotas su tam tikru ruošinio atskaitos tašku (taškas A arba B 1 pav.). CRT rodo staklių koordinates, kurios skiriasi nuo ne etaloninių įrankių įrankių poslinkių. Todėl jie yra išdėstyti tame pačiame taške. Naudojant rankinius arba programinės įrangos skaičiavimus, staklių koordinatės atimamos iš etaloninio įrankio koordinačių. Tada kiekvienam nestandartiniam įrenginiui apskaičiuojamas įrankio poslinkis.
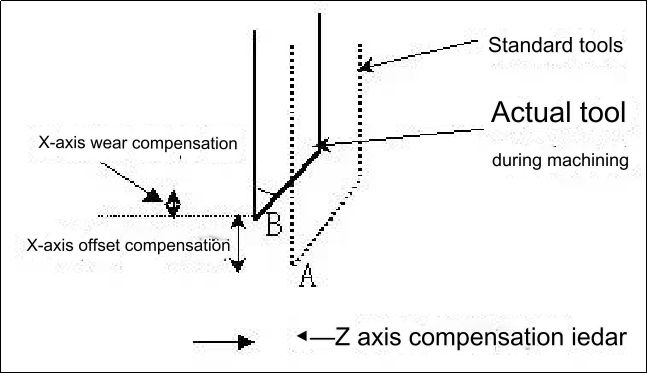
2 pav. Įrankio poslinkio ir nusidėvėjimo kompensavimas
Rankinio bandomojo pjovimo įrankio nustatymų tikslumas yra ribotas. Tai žinoma kaip grubus įrankiai. Kaip parodyta 3 paveiksle, norint pasiekti tikslesnius rezultatus pagal apdirbimo ribącnc auto dalis, galima sukurti paprastą automatizuotą bandomąją pjovimo programą. Etaloninis peilis yra nuolat modifikuojamas naudojant „automatinio pjovimo-matavimo-klaidos kompensavimo“ koncepciją. Neatskaitinio įrankio įrankio poslinkis ir programos pradžios taškas naudojami siekiant įsitikinti, kad skirtumas tarp apdorojimo instrukcijos vertės ir tikrosios išmatuotos vertės atitinka tikslumo reikalavimus. Tikslus įrankio nustatymas yra įrankio nustatymas, kuris atliekamas šiame etape.
Įprasta nestandartinius poslinkius koreguoti po pirminės korekcijos. Taip yra todėl, kad tiksli atskaitos įrankio pradžios taško padėtis yra būtina tikslių įrankio poslinkių sąlyga.
Šis pagrindinis įrankio nustatymo procesas pasiekiamas derinant šiuos du etapus: rankiniu būdu bandomasis peilio pjovimas su nuoroda, kad gautumėte staklių koordinates įrankio nustatymo nuorodai. – Apskaičiuokite arba automatiškai apskaičiuokite kiekvieno ne atskaitos įrankio įrankio poslinkius. – Referencinis peilis yra maždaug programos pradžioje. – Etaloninis peilis pakartotinai iškviečia bandomąją pjovimo programą. Įrankio laikiklis bus perkeltas į MDI arba žingsninį režimą, siekiant kompensuoti klaidas ir pataisyti pradinio taško padėtį. Išmatavus dydį, ne pagrindo peilis pakartotinai iškvies bandomąją pjovimo programą. Įrankio poslinkis koreguojamas pagal šį poslinkį. Tai reiškia, kad atskaitos įrankis bus nejudantis tikslioje programos pradžioje.
3 pav. Įrankio nustatymo schema, skirta bandomajam pjovimui keliais peiliais
Grubių peilių nustatymo metodų apžvalga
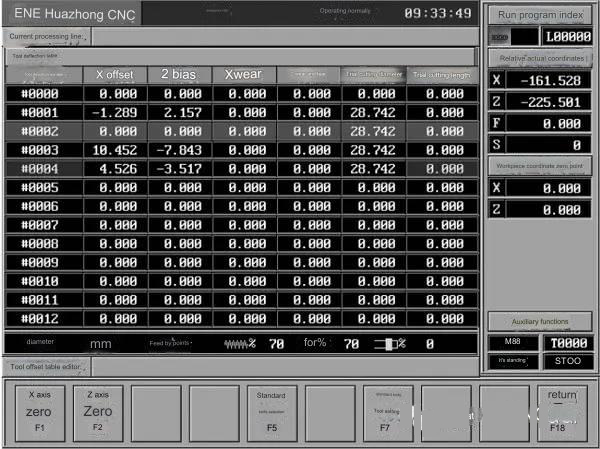
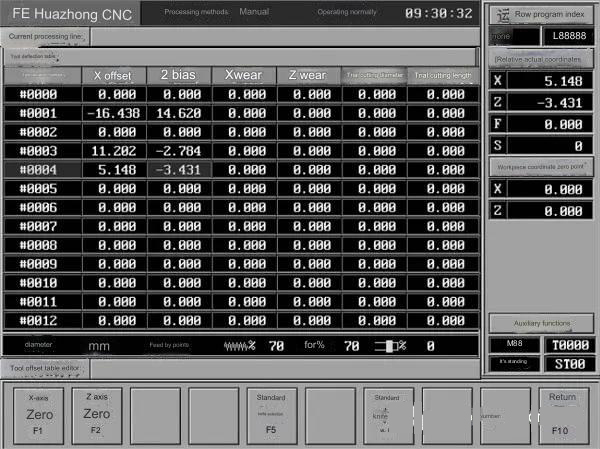
Norėdami pasiruošti įrankio nustatymui, galite naudoti bet kurį iš šių būdų: paspauskite klavišą F2 sistemos MDI submeniu, kad pasiektumėte įrankio poslinkių lentelę. Naudodami klavišus perkelkite paryškinimo juostą į įrankio numerio padėtį, atitinkančią kiekvieną įrankį, ir paspauskite mygtuką F5. Pakeiskite įrankio poslinkio skaičių #0000 ir #0001 X ir Z poslinkio reikšmes, tada paspauskite klavišą F5.
1) Automatiškai nustatykite įrankio poslinkio metodą pasirinkdami atskaitos įrankį.
Įrankio nustatymo veiksmai parodyti 1 ir 4 paveiksluose.
Mėlyną juostą, paryškintą klavišais, galima perkelti, kad sulygiuotų įrankio poslinkis #0002, skirtas 2 atskaitos įrankiui. Atskaitos įrankis 2. Norėdami nustatyti Nr.2, paspauskite klavišą F5. 2 įrankis bus nustatytas kaip numatytasis įrankis.
2) Nupjaukite išorinį apskritimą atskaitos įrankiu ir pažymėkite staklių X koordinates. Įtraukę įrankį, sustabdykite mašiną ir išmatuokite veleno segmento išorinį skersmenį.
3) Atskaitos ašmenys grįžta į tašką A, užfiksuotą „jog+žingsnis“ metodu. Bandymo pjovimo skersmens ir bandymo pjovimo ilgio stulpeliuose įveskite PhD ir nulį.
4) Įtraukite standartinį įrankį ir pasirinkite nestandartinio įrankio numerį. Tada rankiniu būdu pakeiskite įrankį. Kiekvieno nestandartinio įrankio įrankio antgalis turi būti vizualiai sulygiuotas su tašku A, naudojant „jog+žingsnis“ metodą. Sureguliuokite atitinkamą poslinkį po to, kai įrankis vizualiai išlygiuotas. Jei bandomojo pjovimo ilgio ir skersmens stulpeliuose įvesite nulį ir PhD, visų nereferencinių peilių peilių poslinkiai bus automatiškai rodomi X poslinkio ir Z poslinkio stulpeliuose.
5) Kai atskaitos įrankis grįš į tašką A, MDI paleis „G91 G00/arba“ G01 X[100 PhD] Z50, kad pasiektų programos pradžios tašką.
4 pav. Scheminė atskaitos įrankio schema, automatiškai nustatanti įrankio poslinkį standartiniam įrankiui
2. Nustatykite atskaitos įrankio koordinates į nulį įrankio nustatymo atskaitos taške ir automatiškai parodykite įrankio poslinkio metodą
Kaip parodyta 1 ir 5 paveiksluose, įrankio nustatymo veiksmai yra tokie:
1) Tas pats, kas aprašyta aukščiau (2) veiksme.
2) Etaloninis peilis grįžta į bandomąjį pjovimo tašką A taikant metodą „jog + žingsnis“ pagal įrašytą vertę.
3) Sąsajoje, parodytoje 4 paveiksle, paspauskite klavišą F1, kad „nustatytumėte X ašį į nulį“, o paspauskite klavišą F2, kad nustatytumėte Z ašį į nulį. Tada CRT rodomos „santykinės faktinės koordinatės“ yra (0, 0).
4) Rankiniu būdu pakeiskite ne atskaitos įrankį, kad jo įrankio galas būtų vizualiai sulygiuotas su tašku A. Šiuo metu CRT rodoma „santykinių faktinių koordinačių“ reikšmė yra įrankio įrankio poslinkis atskaitos įrankio atžvilgiu. Mygtukais ▲ ir perkelkite mėlyną. Pažymėkite ne atskaitos įrankio įrankio poslinkio numerį, įrašykite jį ir įveskite į atitinkamą padėtį.
5) Tas pats, kas ankstesniame žingsnyje (5).
5 pav. Įrankio poslinkio schema, automatiškai rodoma, kai atskaitos įrankis įrankio nustatymo atskaitos taškų koordinatėse yra nustatytas į nulį.
3. Peilio poslinkio metodas apskaičiuojamas rankiniu būdu apskaičiuojant bandomąjį pjovimą keliais išorinio apskrito veleno segmento peiliais.
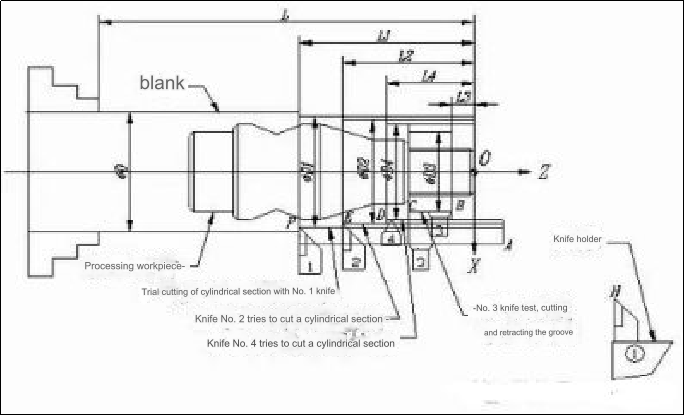
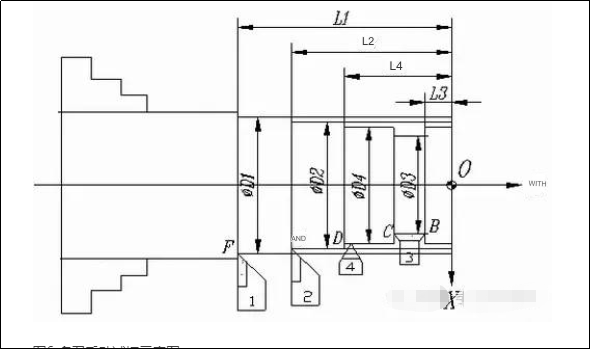
Kaip parodyta 6 paveiksle, sistema rankiniu būdu sulygiuoja 1, 2 ir 4 peilius ir išpjauna ašį. Tada jis įrašo kiekvieno peilio pjovimo galų mašinos koordinates. (6 pav. F, D ir E taškai). Išmatuokite kiekvieno segmento skersmenį ir ilgį. Pakeiskite pjovimo peilį Nr. 1. Kaip parodyta paveikslėlyje, iškirpkite įrankio įdubą. Sulygiuokite pjovimo geležtę su dešiniuoju antgaliu, užrašykite taško B koordinates ir išmatuokite L3 ir PhD3, kaip parodyta paveikslėlyje. Prieauginį koordinačių ryšį tarp kiekvieno įrankio F, E ir D taškų ir O pradžios galima nustatyti palyginus aukščiau pateiktus duomenis.
Tada matyti, kad staklių koordinatės yra (X2-PhD2+100 ir Z2-L2+50) ir staklių koordinatės programos pradžios taškui, atitinkančiam atskaitos įrankį. Skaičiavimo būdas parodytas 1 lentelėje. Tuščiuose laukeliuose įveskite apskaičiuotas ir įrašytas reikšmes. Pastaba: bandomojo pjovimo atstumas yra atstumas tarp ruošinio koordinatės nulinio taško ir bandomojo pjovimo pabaigos taško Z kryptimi. Teigiamos ir neigiamos kryptys nustatomos pagal koordinačių ašį.
6 pav. Kelių peilių rankinio bandomojo pjovimo schema
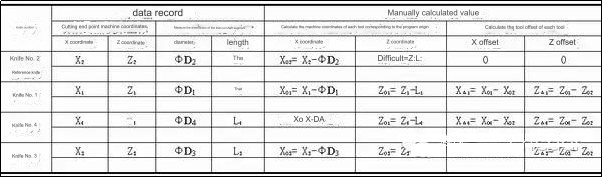
1 lentelė Nestandartinių įrankių įrankių poslinkių apskaičiavimas
Šis metodas leidžia atlikti paprastą bandomojo pjovimo procedūrą, nes nebereikia vizualiai išlyginti bandomojo pjovimo taškų. Tačiau peilio poslinkis turi būti skaičiuojamas rankiniu būdu. Įrankio poslinkį galite greitai apskaičiuoti, jei atspausdinsite lapą su formule ir užpildysite tuščias vietas.
7 pav. Scheminė schema automatiniam įrankių nustatymui Century Star CNC sistemoje
Kelių įrankių automatinio įrankių nustatymo metodas, skirtas 4th Century Star CNC sistemai
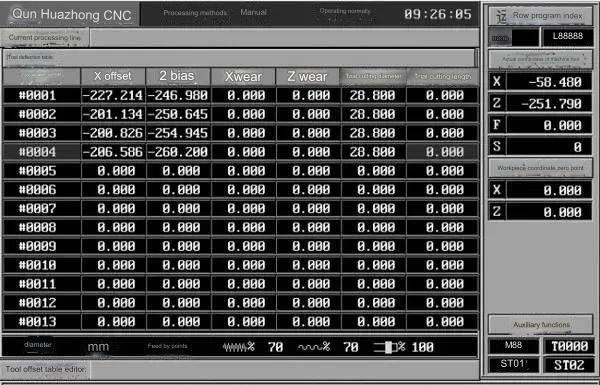
Visi aukščiau paminėti įrankių poslinkio metodai yra santykiniai. Profesionaliems darbuotojams atlikus parametrų nustatymą ir sistemos testavimą, HNC-21T leidžia vartotojams, nustatant įrankius, pasirinkti „absoliutaus poslinkio metodą“. Apdirbimo programavimo metu absoliutus įrankio poslinkis šiek tiek skiriasi nuo santykinio įrankio išjungimo metodo. Nereikia naudoti G92 arba G54 ruošinio koordinačių sistemoms, taip pat nereikia atšaukti įrankio kompensavimo. Pavyzdį žr. programoje O1005. Kaip parodyta 6 paveiksle, kai sistema grįš į nulį, leiskite kiekvienam peiliui rankiniu būdu nupjauti cilindro dalį.
Išmatavę kiekvieno peilio ilgį ir skersmenį, įveskite įrankio poslinkio numerius. Bandomojo pjovimo ilgis nurodytas bandomojo pjovimo skersmens stulpelyje. Sistemos programinė įranga, naudodama metodą, aprašytą „Išorinio veleno segmento pjovimas keliais peiliais – peilio poslinkio skaičiavimas rankiniu būdu“, gali automatiškai apskaičiuoti kiekvieno peilio staklių koordinates pagal programos kilmę. Šis įrankių nustatymo būdas yra greičiausias ir ypač tinka pramoninei gamybai.
Penkių tikslių įrankių nustatymo būdų santrauka
Tikslaus įrankio nustatymo principas yra „automatinis matavimas, automatinis bandomasis pjovimas ir klaidų kompensavimas“. Klaidos kompensavimas gali būti suskirstytas į dvi kategorijas: Pamatinio įrankio MDI veikimui arba žingsnio judinimo įrankio stulpeliais, siekiant kompensuoti programos pradinę padėtį; o nestandartiniam įrankiui kompensuoti jo įrankio poslinkio arba nusidėvėjimo reikšmes. Kad būtų išvengta painiavos, 2 lentelė sukurta verčių skaičiavimui ir registravimui.
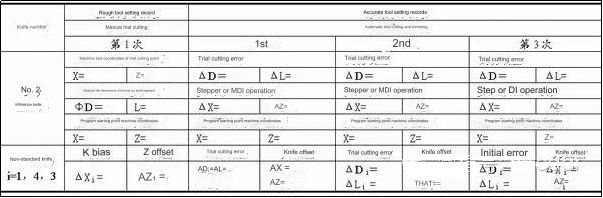
2 lentelė Bandomojo pjovimo metodo įrankių nustatymo įrašų lentelė (vienetas: mm
1. Pakeiskite poslinkio metodą kiekvienam nestandartiniam įrankiui po to, kai atskaitos įrankis pataisys pradžios tašką.
Įrankio nustatymo veiksmai parodyti 3 paveiksle.
Po grubaus įrankio kalibravimo atskaitos įrankis turi būti programos pradžioje. Įveskite kiekvieno nestandartinio įrankio poslinkį į atitinkamą lentelės padėtį.
Norėdami atlikti bandomąjį pjūvį, naudokite programą O1000, kad apdorotumėte PhD2xL2.
Tada išmatuokite segmentuoto pjovimo veleno skersmenį ir ilgį, palyginkite juos su komandų programos reikšme ir nustatykite klaidą.
Pakeiskite programos pradžios tašką, jei MDI klaidos reikšmė arba žingsnio judėjimas yra didesnis nei MDI klaidos reikšmė.
5) Dinamiškai modifikuokite O1000 komandos reikšmę pagal išmatuotus matmenis ir išsaugokite programą. Kartokite veiksmus (2), kol atskaitos įrankio pradinė padėtis bus tikslumo diapazone. Atkreipkite dėmesį į taisytos programos pradžios taško staklių koordinates. Nustatykite koordinates į nulį.
6) Kiekvienam bandomajam pjūviui surinkite O1001 (peilis Nr. 1, Nr. O1002 (peilis Nr. 3)) ir išmatuokite kiekvienos sekcijos ilgį Li (i=1, 2, 3) ir skersmenį PhDi.
7) Kompensuokite klaidas 3 lentelės metodu.
Kartokite 6–7 veiksmus, kol apdirbimo klaidos bus tikslumo ribose, o atskaitos įrankis sustos programos pradžios taške ir nepajudės.
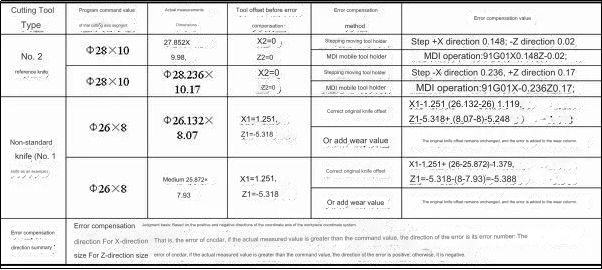
3 lentelė Klaidos kompensavimo pavyzdys cilindrinių veleno segmentų automatiniam bandomajam pjovimui (vienetas: mm).
2. Kiekvieno įrankio pradinės padėties keitimas atskirai
Šio metodo įrankio nustatymo principas yra tas, kad kiekvienas įrankis koreguoja savo pradinį programos tašką, taip netiesiogiai sulygiuodamas su ta pačia pradine padėtimi.
Įrankio nustatymo veiksmai parodyti 3 paveiksle.
Atlikus grubų įrankio kalibravimą, Nr. Po grubaus įrankio kalibravimo ir poslinkių įrašymo 2 atskaitos įrankis turi būti programos pradžioje.
Pirmojo tikslaus įrankio nustatymo metodo 2)–5) žingsniai yra identiški.
Norėdami atlikti bandomąjį pjovimą, naudokite programą O1000. Išmatuokite kiekvienos sekcijos ilgį Li ir skersmenį PhDi.
Žingsnio judėjimo įrankis arba MDI įrankių laikiklis kompensuoja klaidas ir sureguliuoja kiekvieno įrankio programos pradžios tašką.
Kartokite veiksmus (6), kol kiekvieno nestandartinio programos įrankio pradinė padėtis bus leistino tikslumo ribose.
Įrankio poslinkio lentelę galima pasiekti įvedus CRT rodomas santykines koordinates į X poslinkio ir Z poslinkio stulpelius, atitinkančius įrankio poslinkio numerį. Šis metodas yra patogus ir paprastas. Šis metodas yra paprastas ir patogus.
3. Pakeitus įrankio atskaitos programos pradinę padėtį, tuo pačiu metu pakeiskite visus nestandartinių įrankių poslinkio metodus.
Metodas yra toks pat kaip ir pirmojo tikslaus įrankio nustatymo metodo. Vienintelis skirtumas tarp šių dviejų yra tas, kad 7 veiksme iškviečiama programa O1003, kuri vienu metu iškviečia tris peilius (O1004 pašalina Nr. O1003 programa pakeičia įrankio apdorojimo skyrių Nr. 2. Likę žingsniai yra identiški.
6. Šiuo metodu vienu metu galima taisyti keturis peilius
Norėdami sužinoti apdirbimo paklaidą, išmatuokite kiekvienos sekcijos skersmenį PhDi ir kiekvienos sekcijos ilgį Li (i=2, 1, 4), naudodami santykinį įrankio poslinkio metodą. Naudokite MDI arba laipsnišku judesiu prie etaloninio įrankio įrankio laikiklio. Pakeiskite programos pradžios tašką. Nestandartinių įrankių atveju pirmiausia pataisykite poslinkį naudodami pradinį poslinkį. Tada įveskite naują poslinkį. Susidėvėjimo stulpelyje taip pat turi būti įrašyta etaloninio įrankio apdirbimo klaida. Iškvieskite bandomojo pjovimo programą O1005, jei įrankiui kalibruoti naudojamas absoliutus įrankio poslinkis. Tada kompensuokite įrankių apdirbimo klaidas atitinkamų įrankių poslinkio numerių nusidėvėjimo stulpeliuose.
Kokią įtaką CNC tekinimo staklių kokybei turi tinkamo įrankio nustatymo metodo pasirinkimasCNC apdirbimo dalys?
Tikslumas ir tikslumas:
Pjovimo įrankiai bus tinkamai sulygiuoti, jei įrankis bus tinkamai nustatytas. Tai tiesiogiai įtakoja apdirbimo operacijų tikslumą ir tikslumą. Neteisingas įrankio nustatymas gali sukelti matmenų paklaidas, prastą paviršių apdailą ir net laužą.
Nuoseklumas:
Nuosekli įrankio nustatymai užtikrina vienodą apdirbimo operaciją ir vienodą kelių dalių kokybę. Tai sumažina paviršiaus apdailos ir matmenų svyravimus bei padeda išlaikyti griežtus leistinus nuokrypius.
Įrankio tarnavimo laikas ir įrankių apranga:
Užtikrinant, kad įrankis tinkamai susijungtų su ruošiniu, teisingas įrankio nustatymas gali pailginti įrankio tarnavimo laiką. Netinkami įrankio nustatymai gali sukelti pernelyg didelį įrankių nusidėvėjimą ir sulūžimą, o tai sumažins įrankio tarnavimo laiką.
Produktyvumas ir efektyvumas
Veiksmingi įrankių nustatymo būdai gali sutrumpinti mašinos nustatymo laiką ir padidinti veikimo laiką. Jis padidina našumą sumažindamas tuščiosios eigos laiką ir maksimaliai padidindamas pjovimo laiką. Tai leidžia greičiau pakeisti įrankius ir sumažinti bendrą apdirbimo laiką.
Operatoriaus sauga
Tinkamo įrankio nustatymo metodo pasirinkimas gali turėti įtakos operatoriaus saugumui. Kai kurie metodai, pvz., vaizdo atpažinimas arba matavimas lazeriu, pašalina būtinybę tvarkyti įrankius rankiniu būdu, todėl sumažėja sužalojimo tikimybė.
„Anebon“ tikslas yra suprasti puikų gamybos iškraipymą ir visa širdimi teikti aukščiausią pagalbą vidaus ir užsienio klientams 2022 m. Aukštos kokybės nerūdijančio plieno aliuminis, didelio tikslumo, pagamintas pagal užsakymąCNC tekinimas, frezavimas,cnc atsarginės dalys„Aerospace“, siekdama išplėsti savo tarptautinę rinką, „Anebon“ daugiausia tiekia savo užsienio klientams aukščiausios kokybės mechanines dalis, frezuotas dalis ir CNC tekinimo paslaugas.
Kinijos didmeninė prekyba Kinijos mašinų dalimis ir CNC apdirbimo tarnyba, „Anebon“ palaiko „naujovių, harmonijos, komandinio darbo ir dalijimosi, pėdsakų, pragmatiškos pažangos dvasią“. Suteikite mums šansą ir mes įrodysime savo galimybes. Su jūsų malonia pagalba Anebonas tiki, kad kartu su jumis galime sukurti šviesią ateitį.
Paskelbimo laikas: 2023-10-19