
CNC-työstökoneiden tehokkuus on kiinteästi sidoksissa niiden tarkkuuteen, joten se on yritysten keskeinen prioriteetti työkaluja hankittaessa tai kehitettäessä. Useimpien uusien työstökoneiden tarkkuus jää kuitenkin usein vaadittujen standardien alapuolelle tehtaalta poistuttaessa. Lisäksi mekaaninen sisäänajo ja kuluminen pitkäaikaisen käytön aikana korostaa elintärkeää tarvetta säätää CNC-työstökoneiden tarkkuutta optimaalisen tuotannon varmistamiseksi.
1. Välyksen kompensointi
Vastaiskun lieventäminen CNC-työstökoneissa, virheet, jotka johtuvat kunkin koordinaattiakselin syöttöketjun käyttökomponenttien käänteisistä kuolleista vyöhykkeistä ja kunkin mekaanisen liikkeensiirtoparin käänteisestä välyksestä, johtavat poikkeamiin kunkin koordinaattiakselin siirtyessä eteenpäin liikkeestä taaksepäin. Tämä poikkeama, joka tunnetaan myös nimellä käänteinen välys tai liikemäärän menetys, voi merkittävästi vaikuttaa työstökoneen paikannustarkkuuteen ja toistuvaan paikannustarkkuuteen, kun käytetään puolisuljetun silmukan servojärjestelmiä. Lisäksi kinemaattisten parivälysten asteittainen lisääntyminen kulumisesta ajan myötä johtaa vastaavaan käänteisen poikkeaman kasvuun. Siksi säännöllinen mittaus ja työstökoneen kunkin koordinaattiakselin käänteisen poikkeaman kompensointi on välttämätöntä.

Takaiskun mittaaminen
Käänteisen poikkeaman arvioimiseksi aloita koordinaattiakselin liikealueelta. Määritä ensin vertailupiste siirtämällä asetettu etäisyys joko eteen- tai taaksepäin. Anna tämän jälkeen tietty liikekomento samaan suuntaan tietyn matkan kattamiseksi. Jatka seuraavaksi siirtämään samaa matkaa vastakkaiseen suuntaan ja määritä referenssi- ja pysäytysasennon välinen varianssi. Tyypillisesti useita mittauksia (usein seitsemän) suoritetaan kolmessa paikassa lähellä matka-alueen keskipistettä ja molempia ääripäitä. Keskiarvo lasketaan sitten kussakin paikassa, ja näiden keskiarvojen maksimiarvoa käytetään käänteisen poikkeaman mittana. On välttämätöntä siirtää tietty etäisyys mittausten aikana, jotta käänteisen poikkeaman arvo voidaan määrittää tarkasti.

Lineaarisen liikeakselin käänteistä poikkeamaa arvioitaessa on yleistä käyttää mittaustyökaluna mittakelloa tai mittakelloa. Jos olosuhteet sallivat, tähän tarkoitukseen voidaan käyttää myös kaksitaajuista laserinterferometriä. Mittauskelloa käytettäessä on tärkeää varmistaa, että mittarin kanta ja varsi eivät ulotu liikaa, sillä pitkä uloke mittauksen aikana voi aiheuttaa mittarin alustan liikkumisen voiman vaikutuksesta, mikä johtaa epätarkkoihin lukemiin ja epärealistisiin kompensaatioarvoihin.
Ohjelmointimenetelmän käyttöönotto mittaukseen voi parantaa prosessin mukavuutta ja tarkkuutta. Esimerkiksi kolmen koordinaatin pystysuoran työstökoneen X-akselin käänteisen poikkeaman arvioimiseksi prosessi voidaan aloittaa painamalla mittaria karan sylinterimäistä pintaa vasten, minkä jälkeen suoritetaan määrätty mittausohjelma.
N10G91G01X50F1000; siirrä työpöytää oikealle
N20X-50;työpöytä siirtyy vasemmalle siirtoraon poistamiseksi
N30G04X5; tauko havainnointiin
N40Z50; Z-akseli ylhäällä ja poissa tieltä
N50X-50: Työpöytä liikkuu vasemmalle
N60X50: Työpöytä liikkuu oikealle ja nollautuu
N70Z-50: Z-akselin nollaus
N80G04X5: Tauko tarkkailua varten
N90M99;
On tärkeää huomata, että mitatut tulokset voivat vaihdella työpöydän eri käyttönopeuksien mukaan. Yleensä alhaisella nopeudella mitattu arvo on suurempi kuin suurella nopeudella, erityisesti kun työstökoneen akselin kuormitus ja liikevastus ovat huomattavat. Pienemmillä nopeuksilla työpöytä liikkuu hitaammin, mikä vähentää ylityksen ja yliliikkeen todennäköisyyttä, jolloin saadaan korkeampi mittausarvo. Toisaalta suuremmilla nopeuksilla ylitystä ja yliliikettä esiintyy todennäköisemmin työpöydän suuremman nopeuden vuoksi, mikä johtaa pienempään mittausarvoon. Pyörivän liikkeen akselin käänteisen poikkeaman mittausmenetelmä noudattaa samanlaista prosessia kuin lineaarinen akseli, ja ainoa ero on havaitsemiseen käytetty instrumentti.

Vastaiskun kompensointi
Lukuisten maassa valmistettujen CNC-työstökoneiden paikannustarkkuus on yli 0,02 mm, mutta niiltä puuttuu kyky kompensoida. Tietyissä tilanteissa ohjelmointitekniikoita voidaan käyttää tällaisten työstökoneiden yksisuuntaisen paikantamisen suorittamiseksi ja välyksen poistamiseksi. Niin kauan kuin mekaaninen komponentti pysyy muuttumattomana, interpolointikäsittelyn aloittaminen on mahdollista, kun hidas, yksisuuntainen paikannus saavuttaa interpoloinnin aloituspisteen. Kun interpoloinnin aikana tapahtuu käänteinen suunta, käänteisen tyhjennysarvon muodollinen interpolointi voi parantaa interpoloinnin käsittelyn tarkkuutta ja täyttää tehokkaasticnc jyrsitty osan toleranssivaatimukset.
Muiden CNC-työstökoneiden osalta CNC-laitteessa on tyypillisesti useita muistiosoitteita tallentamaan kunkin akselin välyksen arvo. Kun työstökoneen akselia ohjataan vaihtamaan liikesuuntaansa, CNC-laite hakee automaattisesti akselin välyksen arvon, joka kompensoi ja korjaa koordinaattisiirtymäkäskyn arvon. Tämä varmistaa, että työstökone voidaan sijoittaa tarkasti komentoasentoon ja vähentää käänteisen poikkeaman haitallista vaikutusta työstökoneen tarkkuuteen.
Tyypillisesti CNC-järjestelmät on varustettu yhdellä käytettävissä olevalla välyksen kompensointiarvolla. Nopeiden ja pienten nopeuksien liikkeen tarkkuuden tasapainottamisesta sekä mekaanisista parannuksista tulee haastavaa. Lisäksi nopean liikkeen aikana mitattua vastasuuntaisen poikkeaman arvoa voidaan käyttää vain tulokompensointiarvona. Tämän seurauksena tasapainon saavuttaminen nopean paikannustarkkuuden ja interpolointitarkkuuden välillä leikkaamisen aikana osoittautuu vaikeaksi.

CNC-järjestelmille, kuten FANUC0i ja FANUC18i, on saatavana kaksi välyksen kompensointimuotoa nopealle liikkeelle (G00) ja hitaalle leikkaussyöttöliikkeelle (G01). Valitusta syöttötavasta riippuen CNC-järjestelmä valitsee ja käyttää automaattisesti erillisiä kompensaatioarvoja parantaakseen käsittelytarkkuutta.
G01-leikkaussyöttöliikkeestä saatu välysarvo A tulee syöttää parametriin NO11851 (G01-koenopeus määritetään yleisesti käytetyn leikkaussyöttönopeuden ja työstökoneen ominaisuuksien perusteella), kun taas välyksen arvo B G00:sta tulee syöttää. parametriin NO11852. On tärkeää huomata, että jos CNC-järjestelmä pyrkii suorittamaan erikseen määritellyn käänteisen välyksen kompensoinnin, parametrin numeron 1800 neljäs numero (RBK) on asetettava arvoon 1; muutoin erikseen määriteltyä paluuvälyksen kompensointia ei suoriteta. Aukon kompensointi. G02, G03, JOG ja G01 käyttävät kaikki samaa kompensaatioarvoa.

Korvaus pitch-virheistä
CNC-työstökoneiden tarkkuusasemointi sisältää sen arvioinnin, kuinka tarkkuudella työstökoneen liikkuvat komponentit pääsevät CNC-järjestelmän ohjauksessa. Tällä tarkkuudella on ratkaiseva rooli CNC-työstökoneiden erottamisessa perinteisistä työkaluista. Yhdistettynä työstökoneen geometriseen tarkkuuteen, se vaikuttaa merkittävästi leikkaustarkkuuteen erityisesti reiän työstyksessä. Reikien porauksen nousuvirheellä on huomattava vaikutus. CNC-työstökoneen kyky arvioida työstötarkkuuttaan riippuu saavutetusta paikannustarkkuudesta. Siksi CNC-työstökoneiden paikannustarkkuuden havaitseminen ja korjaaminen ovat olennaisia toimenpiteitä käsittelyn laadun varmistamiseksi.
Pitch-mittausprosessi
Tällä hetkellä ensisijainen menetelmä työstökoneiden arvioinnissa ja käsittelyssä on kaksitaajuisten laserinterferometrien käyttö. Nämä interferometrit toimivat laserinterferometrian periaatteilla ja käyttävät reaaliaikaista laseraallonpituutta mittauksen referenssinä, mikä parantaa mittaustarkkuutta ja laajentaa sovellusaluetta.
Prosessi sävelkorkeuden havaitsemiseksi on seuraava:
- Asenna kaksitaajuinen laserinterferometri.
- Sijoita optinen mittauslaite mittausta vaativan työstökoneen akselille.
- Kohdista laserpää varmistaaksesi, että mittausakseli on joko yhdensuuntainen tai kollineaarinen työstökoneen liikeakselin kanssa, mikä esikohdistaa optisen reitin.
- Syötä mittausparametrit, kun laser saavuttaa käyttölämpötilansa.
- Suorita määrätyt mittaustoimenpiteet siirtämällä työstökonetta.
- Käsittele tiedot ja luo tulokset.
Pitch Error Compensation ja automaattinen kalibrointi
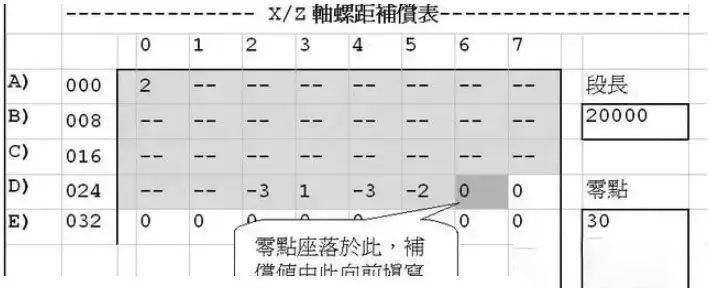
Kun CNC-työstökoneen mitattu paikannusvirhe ylittää sallitun alueen, virhe on korjattava. Eräs yleinen lähestymistapa sisältää nousuvirheen kompensointitaulukon laskemisen ja sen syöttämisen manuaalisesti työstökoneen CNC-järjestelmään paikannusvirheen korjaamiseksi. Manuaalinen kompensointi voi kuitenkin olla aikaa vievää ja virhealtista, etenkin kun käsitellään lukuisia kompensointipisteitä CNC-työstökoneen kolmen tai neljän akselin välillä.
Tämän prosessin tehostamiseksi on kehitetty ratkaisu. Yhdistämällä tietokone ja työstökoneen CNC-ohjain RS232-liitännän kautta ja hyödyntämällä VB:ssä luotua automaattista kalibrointiohjelmistoa on mahdollista synkronoida laserinterferometri ja CNC-työstökone. Tämä synkronointi mahdollistaa CNC-työstökoneen paikannustarkkuuden automaattisen havaitsemisen ja automaattisen nousuvirheen kompensoinnin. Korvausmenetelmä sisältää:
- Varmuuskopion luominen CNC-ohjausjärjestelmän olemassa olevista kompensointiparametreista.
- Luodaan tietokoneella työstökoneen CNC-ohjelma pistekohtaisen paikannustarkkuuden mittaamiseen, joka sitten välitetään CNC-järjestelmään.
- Mittaa automaattisesti kunkin pisteen paikannusvirheen.
- Luodaan uusi joukko kompensointiparametreja ennalta määrättyjen kompensointipisteiden perusteella ja lähetetään ne CNC-järjestelmään automaattista äänenkorkeuden kompensointia varten.
- Tarkkuus tarkistetaan toistuvasti.
Näillä erityisratkaisuilla pyritään parantamaan CNC-työstökoneiden tarkkuutta. On kuitenkin tärkeää huomata, että eri CNC-työstökoneiden tarkkuus voi vaihdella. Tämän vuoksi työstökoneet tulee kalibroida niiden yksilöllisten olosuhteiden mukaan.
Jos virheen kompensointia ei suoriteta työstökoneessa, mikä vaikutus sillä on valmistettuihin CNC-osiin?
Jos virheen kompensointi jätetään huomiotta työstökoneessa, se voi johtaa eroihinCNC osatvalmistettu. Esimerkiksi jos työstökoneessa on säätämätön paikoitusvirhe, työkalun tai työkappaleen todellinen sijainti voi poiketa CNC-ohjelmassa määritetystä ohjelmoidusta asemasta, mikä johtaa mittaepätarkkuuksiin ja geometrisiin virheisiin valmistetuissa osissa.
Jos esimerkiksi CNC-jyrsinkoneessa on säätämätön asemointivirhe X-akselilla, työkappaleen jyrsityt urat tai reiät voivat olla väärin kohdistettuja tai niillä voi olla väärät mitat. Vastaavasti sorvauksessa säätämättömät paikannusvirheet voivat aiheuttaa epätarkkuuksia sorvattujen osien halkaisijassa tai pituudessa. Nämä erot voivat johtaa vaatimustenvastaisten osien rikkoutumiseen
Anebon tekee jokaisesta kovasta työstä tullakseen erinomaiseksi ja erinomaiseksi, ja nopeuttaa toimenpiteitämme, jotta voimme nousta mannertenvälisten huippuluokan ja korkean teknologian yritysten joukosta Kiinan kultatoimittajalle OEM:lle, Customcnc-koneistuspalvelu, Metallilevyjen valmistuspalvelu, jyrsintäpalvelut. Anebon tekee henkilökohtaisen ostoksesi tyydyttääksesi itsesi tyydyttävästi! Anebonin liiketoiminta perustaa useita osastoja, mukaan lukien tuotantoosasto, tuloosasto, erinomainen valvontaosasto ja palvelukeskus jne.
Tehdastarjonta KiinassaTarkkuusosa ja alumiiniosa, Voit kertoa Anebonille ideasi kehittää omalle mallillesi ainutlaatuinen muotoilu, jotta samankaltaisia osia ei tule liikaa markkinoille! Aiomme tarjota parasta palveluamme täyttääksemme kaikki tarpeesi! Muista ottaa heti yhteyttä Aneboniin!
Postitusaika: 09.01.2024