
Tiedätkö kuinka monta menetelmää CNC-sorveilla on työkalujen tarkkaan säätöön?
Kosketusanturimenetelmä: - Tämä menetelmä käyttää mittapäätä, joka koskettaa työkalua sen sijainnin mittaamiseksi suhteessa koneen vertailupisteeseen. Se antaa tarkat tiedot työkalun halkaisijasta ja pituudesta.
Työkalun esiasetus:Työkalun esiasetuskiinnikettä käytetään työkalun mittojen mittaamiseen koneen ulkopuolella. Tämä menetelmä mahdollistaa työkalun nopean ja tarkan asennuksen.
Työkalun offset-menetelmä:– Tässä menetelmässä käyttäjä mittaa työkalun pituuden ja halkaisijan työkaluilla, kuten jarrusatulat ja mikrometrit. Arvot syötetään sitten koneen ohjausjärjestelmään.
Lasertyökalun mittaus:Laserjärjestelmiä käytetään työkalujen mittojen asettamiseen ja mittaamiseen. Projisoimalla laservalonsäteen työkalun leikkuureunaan ne tarjoavat tarkat ja nopeat työkalutiedot.
Kuvan tunnistusmenetelmä:Kehittyneet tietokonejärjestelmät voivat käyttää kuvantunnistustekniikkaa työkalujen mittojen automaattiseen laskemiseen. He tekevät tämän ottamalla kuvia työkalusta, analysoimalla sen ominaisuuksia ja laskemalla sitten mittaukset.
Tämä on erittäin hyödyllinen artikkeli. Artikkelissa esitellään ensin CNC-sorveissa yleisesti käytetyn "koe-leikkaustyökalun asetusmenetelmän" periaatteet ja ideat. Sitten se esittelee neljä manuaalista menetelmää leikkaustyökalujen koeasetuksille CNC-sorvausjärjestelmissä. Sen työkaluasetusten tarkkuuden parantamiseksi kehitettiin ohjelmaohjattu automaattinen koeleikkausmenetelmä, joka perustuu "automaattiseen leikkaus - mittaus - virheen kompensointiin". Myös neljä tarkkaa työkalun asetusmenetelmää on koottu yhteen.
1. CNC-sorvien työkaluasetusmenetelmän periaate ja ideat
CNC-sorvin työkalun asetusperiaatteiden ymmärtäminen on tärkeää käyttäjille, jotka haluavat pitää selkeät käsitykset työkalun asettamisesta, hallita työkalun säätötoimintoja ja ehdottaa uusia menetelmiä. Työkaluasetus on työkappaleen koordinaattijärjestelmän alkupisteen määrittäminen, joka muuttuu työstökoneen koordinaattijärjestelmää ohjelmoitaessa. Työkalun asetus sisältää koneen koordinaattien hankkimisen referenssityökaluohjelman aloituspisteelle ja työkalun siirtymän määrittämisen suhteessa kyseiseen työkaluun.
Seuraavia käytäntöjä käytetään osoittamaan käsitteitä ja ideoita työkalun asettamisen takana koeleikkausmenetelmällä. Käytä Hua Medieval Star Teaching Turning System -järjestelmää (sovellusohjelmiston versionumero 5.30); käytä työkappaleen oikean päätypinnan keskikohtaa ohjelman lähtökohtana ja aseta se G92-komennolla. Halkaisijaohjelmointi, ohjelman alkupisteen H työkappaleen koordinaatit ovat (100,50); asenna neljä työkalua työkalunpitimeen. Työkalu nro 1 on 90 asteen karkea sorvaustyökalu ja nro Referenssityökalu 2 on 90 asteen ulkokehän hienosorvaustyökalu. veitsi, nro. 4. veitsi on kolmion muotoinen kierteinen veitsi, jonka kulma on 60 astetta (esimerkit artikkelissa ovat kaikki samat).
Työkalun asettamiseen käytetään "konetyökalun" koordinaatteja. Kuten kuvassa 1 näkyy, referenssityökalu "testi leikkaa käsin työkappaleen ulkoympyrän ja päätypinnan ja tallentaa XZ-työstökoneen koordinaatit näytölle. Työstökoneen koordinaatit ohjelman origolle O johdetaan työstökoneen koordinaattien suhteesta pisteiden A ja O välillä: XO=XA – Phd, ZO=ZA. Käyttämällä työkappaleen H:n koordinaatteja suhteessa pisteeseen O (100,50), voimme lopulta johtaa työstökoneen koordinaatit pisteelle H: XH=100 – Phd, ZH=ZA+50. Tämä työkappaleen koordinaattijärjestelmä perustuu työkalun kärjen sijaintiin referenssityökalussa.
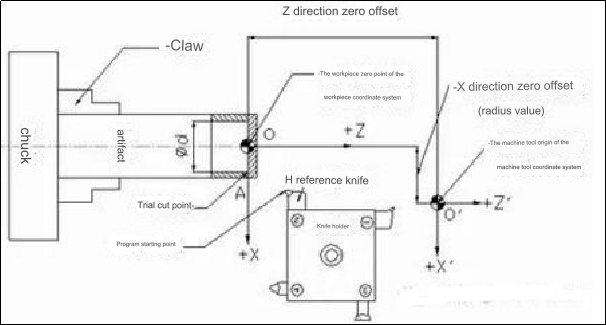
Kuva 1 Kaaviokaavio manuaaliselle koeleikkaukselle ja työkalun asetuksille
Kuvassa 2 pisteen A ja työkalun kärjen B välinen siirtymä johtuu työkalunpitimeen kiinnitettyjen työkalujen ulottuvuuksien ja asemien eroista X- ja Z-suunnassa. Työkappaleen alkuperäinen koordinaattijärjestelmä ei ole enää voimassa. Jokainen työkalu kuluu myös eri nopeudella käytön aikana. Siksi jokaisen työkalun työkalusiirtymät ja kulumisarvot on kompensoitava.
Työkalun siirtymän määrittämiseksi jokainen työkalu on kohdistettava tiettyyn työkappaleen referenssipisteeseen (piste A tai B kuvassa 1). CRT näyttää työstökoneen koordinaatit, jotka poikkeavat muiden kuin vertailutyökalujen työkalusiirroista. Siksi ne on sijoitettu samaan kohtaan. Manuaalisia laskelmia tai ohjelmistolaskelmia käyttämällä koneen koordinaatit vähennetään referenssityökalun koordinaateista. Työkalun siirtymä lasketaan sitten jokaiselle ei-standardilaitteelle.
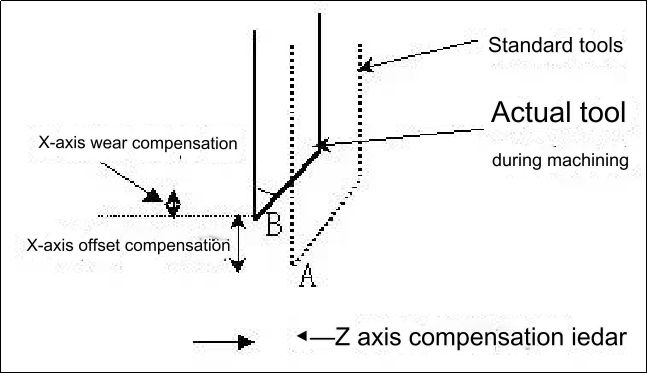
Kuva 2 Työkalun siirtymän ja kulumisen kompensointi
Leikkuutyökalun manuaalisten koeasetusten tarkkuus on rajallinen. Tämä tunnetaan karkeana työkaluna. Kuten kuvassa 3, tarkempien tulosten saavuttamiseksi koneistusvaran sisälläcnc auton osa, voidaan suunnitella yksinkertainen automaattinen koeleikkausohjelma. Vertailuveistä muokataan jatkuvasti käyttämällä "automaattisen leikkaus-mittaus-virheen kompensoinnin" käsitettä. Ei-referenssityökalun työkalusiirtymän ja ohjelman aloituspisteen avulla varmistetaan, että käsittelykäskyn arvon ja todellisen mitatun arvon välinen ero täyttää tarkkuusvaatimukset. Tarkkuustyökaluasetus on työkaluasetus, joka tapahtuu tässä vaiheessa.
On tavallista, että epästandardit poikkeamat korjataan alkuperäisen korjauksen jälkeen. Tämä johtuu siitä, että referenssityökalun aloituspisteen tarkan sijainnin varmistaminen on tarkkojen työkalusiirtymien edellytys.
Tämä työkalun perusasetusprosessi saavutetaan yhdistämällä nämä kaksi vaihetta: veitsen manuaalinen koeleikkaus viitteellä saadaksesi työstökoneen koordinaatit työkalun asetusviittaukselle. – Laske tai laske automaattisesti jokaisen ei-referenssityökalun työkalusiirrot. – Vertailuveitsi sijaitsee likimääräisessä ohjelman alussa. – Referenssiveitsi kutsuu toistuvasti koeleikkausohjelman. Työkalunpidintä siirretään MDI- tai askeltilassa virheiden kompensoimiseksi ja aloituspisteen sijainnin korjaamiseksi. Koon mittaamisen jälkeen ei-pohjaveitsi kutsuu toistuvasti koeleikkausohjelmaa. Työkalun siirtymä korjataan tämän siirtymän perusteella. Tämä tarkoittaa, että referenssityökalu on paikallaan ohjelman tarkalleen alkaessa.
Kuva 3 Kaaviokaavio työkalun asetuksista moniveitsikoeleikkaukseen
Yleiskatsaus karkeisiin veitsen asetustekniikoihin
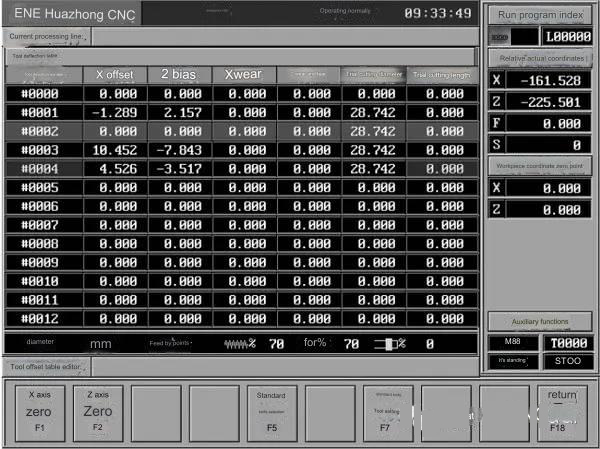
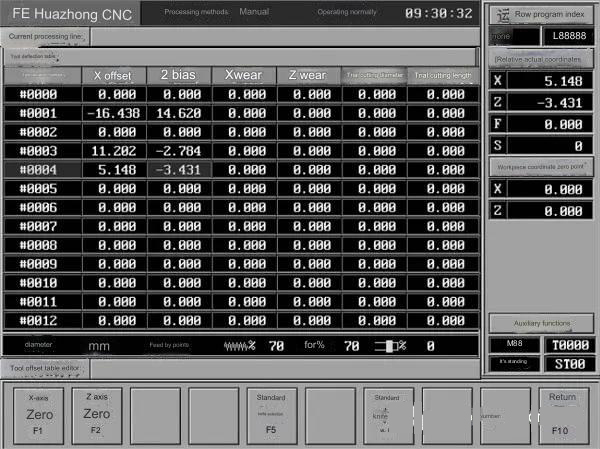
Voit valmistautua työkalun asennukseen jollakin seuraavista tavoista: paina F2-näppäintä järjestelmän MDI:n alivalikossa päästäksesi työkalun siirtymätaulukkoon. Siirrä korostuspalkki näppäimillä kutakin työkalua vastaavaan työkalunumeron paikkaan ja paina F5-painiketta. Muokkaa työkalupoikkeamanumeroiden #0000 ja #0001 X- ja Z-offset-arvoja ja paina sitten näppäintä F5.
1) Aseta työkalun siirtomenetelmä automaattisesti valitsemalla referenssityökalu.
Työkalun asetusvaiheet näkyvät kuvissa 1 ja 4.
Näppäimillä korostettua sinistä palkkia voidaan siirtää kohdistaaksesi työkalun siirtymän #0002 referenssityökalulle nro 2. Viitetyökalu 2. Aseta numero 2 painamalla F5-näppäintä. 2-työkalu asetetaan oletustyökaluksi.
2) Leikkaa ulkoympyrä referenssityökalulla ja merkitse muistiin työstökoneen X-koordinaatit. Kun olet vetänyt työkalun sisään, pysäytä kone ja mittaa akselisegmentin ulkohalkaisija.
3) Referenssiterä palaa pisteeseen A, joka on tallennettu "joökki+askel" -menetelmällä. Syötä testin leikkaushalkaisijan ja testin leikkauspituuden sarakkeisiin PhD ja nolla.
4) Vedä vakiotyökalu sisään ja valitse epästandardin työkalun numero. Vaihda sitten työkalu manuaalisesti. Kunkin ei-standardin työkalun työkalun kärki tulee kohdistaa visuaalisesti pisteen A kanssa käyttämällä "ryök+askel" -menetelmää. Säädä vastaava siirtymä sen jälkeen, kun työkalu on kohdistettu visuaalisesti. Jos syötät nollan ja PhD koeleikkauspituuden ja -halkaisijan sarakkeisiin, kaikkien muiden kuin vertailuveitsien veitsisiirtymät näytetään automaattisesti X-siirtymä- ja Z-siirtymäsarakkeissa.
5) Kun referenssityökalu on palannut pisteeseen A, MDI ajaa “G91 G00/tai” G01 X[100 PhD] Z50 päästäkseen ohjelman aloituspisteeseen.
Kuva 4 Viitetyökalun kaavio, joka asettaa automaattisesti työkalun siirtymän vakiotyökalulle
2. Aseta referenssityökalun koordinaatit nollaan työkalun asetusviitepisteeseen ja näytä työkalun offset-menetelmä automaattisesti
Kuten kuvassa 1 ja kuvassa 5 näkyy, työkalun asetusvaiheet ovat seuraavat:
1) Sama kuin vaihe (2) yllä.
2) Vertailuveitsi palaa koeleikkauspisteeseen A "jookki + askel" -menetelmällä tallennetun arvon mukaisesti.
3) Paina F1-näppäintä kuvan 4 mukaisessa käyttöliittymässä “asettaaksesi X-akselin nollaan” ja painamalla F2-näppäintä “asettaaksesi Z-akselin nollaan”. Tällöin CRT:n näyttämät "suhteelliset todelliset koordinaatit" ovat (0, 0).
4) Muuta ei-viittaustyökalua manuaalisesti niin, että sen työkalun kärki on visuaalisesti kohdistettu pisteeseen A. Tällä hetkellä CRT:ssä näkyvä "suhteellisten todellisten koordinaattien" arvo on työkalun työkalun siirtymä suhteessa referenssityökaluun. Siirrä sinistä ▲- ja -näppäimillä Korosta ei-viittaustyökalun työkalun siirtymän numero, tallenna se ja syötä se vastaavaan kohtaan.
5) Sama kuin edellinen vaihe (5).
Kuva 5 Työkalun poikkeaman kaavio, joka näytetään automaattisesti, kun referenssityökalu asetetaan nollaan työkalun asetusten referenssipisteiden koordinaateissa.
3. Veitsen siirtymämenetelmä lasketaan laskemalla manuaalisesti koeleikkaus useilla ulomman pyöreän akselisegmentin veitsillä.
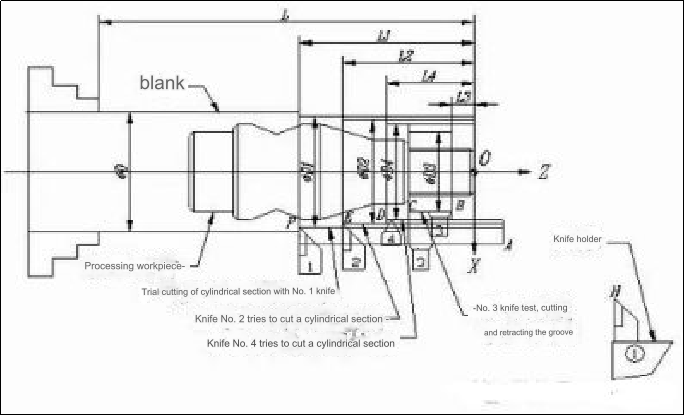
Kuten kuvasta 6 näkyy, järjestelmä kohdistaa manuaalisesti veitset 1, 2 ja 4 ja leikkaa akselin. Sitten se tallentaa koneen koordinaatit kunkin veitsen leikkauspäille. (Pisteet F, D ja E kuvassa 6). Mittaa kunkin segmentin halkaisija ja pituus. Vaihda leikkuuveitsi nro 1. Leikkaa työkalun syvennys kuvan mukaisesti. Kohdista leikkuuterä oikean kärjen kanssa, kirjaa pisteen B koordinaatit ja mittaa L3 ja PhD3 kuvan mukaisesti. Inkrementaalinen koordinaattisuhde F-, E- ja D-pisteiden välillä kussakin työkalussa ja O-origossa voidaan määrittää vertaamalla yllä olevia tietoja.
Tällöin voidaan nähdä, että työstökoneen koordinaatit ovat (X2-PhD2+100 ja Z2-L2+50) ja työstökoneen koordinaatit referenssityökalua vastaavalle ohjelman aloituspisteelle. Laskentatapa on esitetty taulukossa 1. Syötä lasketut ja tallennetut arvot tyhjiin kohtiin. Huomaa: Koelaikkausetäisyys on työkappaleen koordinaatin nollapisteen ja Z-suunnassa olevan koelahauksen loppupisteen välinen etäisyys. Positiiviset ja negatiiviset suunnat määräytyvät koordinaattiakselin mukaan.
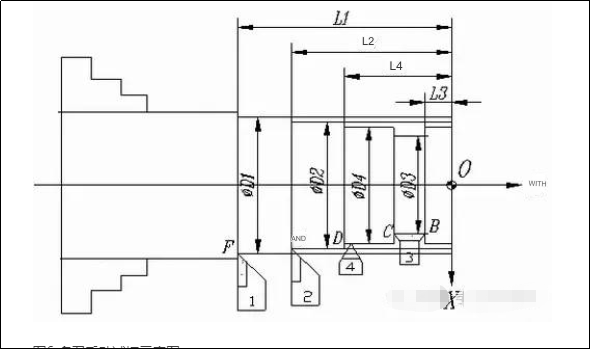
Kuva 6 Kaaviokuva usean veitsen manuaalisesta koeleikkauksesta
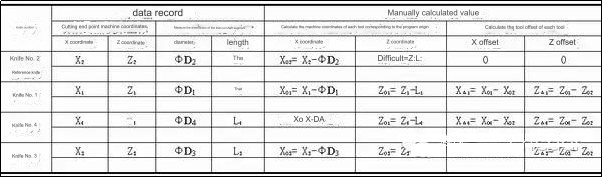
Taulukko 1 Työkalusiirron laskenta ei-standardityökaluille
Tämä menetelmä mahdollistaa yksinkertaisen koeleikkausmenettelyn, koska se eliminoi tarpeen kohdistaa visuaalisesti testileikkauspisteitä. Veitsen siirtymä on kuitenkin laskettava manuaalisesti. Voit laskea työkalusiirtymän nopeasti, jos tulostat arkin kaavan mukaan ja täytät sitten tyhjät kohdat.
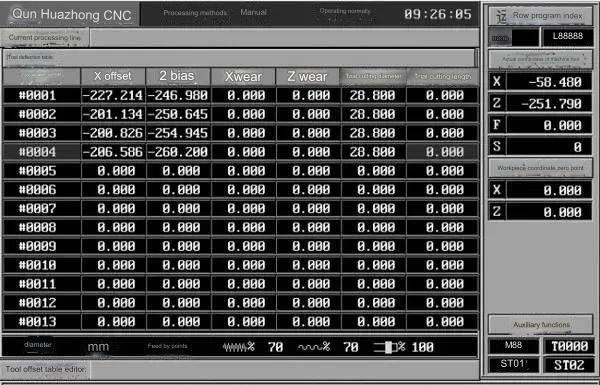
Kuva 7 Kaaviokaavio automaattiselle työkalun asetukselle Century Star CNC -järjestelmässä
Monityökalu automaattinen työkalusarja menetelmä 4th Century Star CNC -järjestelmään
Kaikki edellä mainitut menetelmät työkalun siirrolle ovat suhteellisia menetelmiä. Kun ammattitaitoinen henkilökunta on suorittanut parametrien asettamisen ja järjestelmätestauksen, HNC-21T antaa käyttäjille mahdollisuuden valita "absoluuttisen offset-menetelmän" työkaluja asetettaessa. Koneistusohjelmoinnissa absoluuttinen työkalusiirtymä on hieman erilainen kuin suhteellinen työkalun poistomenetelmä. Työkappaleen koordinaatistoille ei tarvitse käyttää G92:ta tai G54:ää, eikä työkalun korjausta tarvitse peruuttaa. Katso esimerkki ohjelmasta O1005. Kuten kuvasta 6 näkyy, kun järjestelmä on palannut nollaan, anna jokaisen veitsen yrittää manuaalisesti leikata sylinteriosa.
Täytä työkalun siirtymänumerot kullekin veitselle pituuden ja halkaisijan mittaamisen jälkeen. Koeleikkauspituus on lueteltu koeleikkaushalkaisijan sarakkeessa. Järjestelmäohjelmisto voi laskea automaattisesti kunkin veitsen työstökoneen koordinaatit ohjelman alkuperän mukaan kohdassa ”Ulkoisen akselisegmentin moniveitsileikkaus – Manuaalinen laskenta veitsen siirtymälle” kuvatulla menetelmällä. Tämä työkalun säätötapa on nopein, ja se soveltuu erityisen hyvin teolliseen tuotantoon.
Yhteenveto viidestä tarkasta työkalun asetustekniikasta
Tarkan työkaluasetuksen periaate on "automaattinen mittaus, automaattinen koeleikkaus ja virheen kompensointi". Virheen kompensointi voidaan jakaa kahteen luokkaan: Referenssityökalun MDI-toimintaa varten tai työkalutolppien siirto ohjelman aloitusaseman kompensoimiseksi; ja ei-standardityökalulle työkalun siirtymän tai kulumisarvojen kompensoimiseksi. Sekaannusten välttämiseksi taulukko 2 on suunniteltu laskemaan ja tallentamaan arvot.
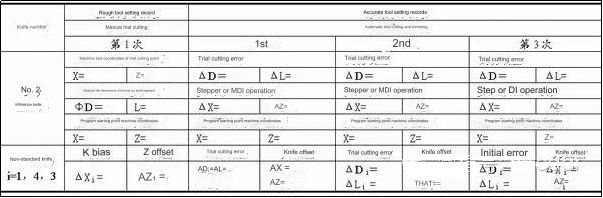
Taulukko 2 Työkalun asetusten tietuetaulukko koeleikkausmenetelmälle (yksikkö: mm
1. Muokkaa kunkin epästandardin työkalun offset-menetelmää sen jälkeen, kun vertailutyökalu on korjannut aloituspisteen.
Työkalun asetusvaiheet näkyvät kuvassa 3.
Karkean työkalun kalibroinnin jälkeen referenssityökalun tulee olla ohjelman alussa. Syötä jokaisen epästandardin työkalun siirtymä taulukon oikeaan kohtaan.
Käytä O1000-ohjelmaa PhD2xL2:n prosessoimiseen koeleikkauksen tekemiseen.
Mittaa sitten segmentoidun leikkausakselin halkaisija ja pituus, vertaa niitä komentoohjelman arvoihin ja määritä virhe.
Muokkaa ohjelman aloituspistettä, jos MDI-virhearvo tai askelliike on suurempi kuin MDI-virhearvo.
5) Muokkaa O1000-komennon arvoa dynaamisesti mitattujen mittojen perusteella ja tallenna ohjelma. Toista vaiheet (2), kunnes referenssityökalun aloitusasema on tarkkuusalueella. Huomioi korjatun ohjelman aloituspisteen työstökoneen koordinaatit. Aseta koordinaatit nollaan.
6) Valitse O1001 (veitsi nro 1, nro O1002 (veitsi nro 3) jokaiselle koeleikkaukselle ja mittaa kunkin osan pituus Li (i=1, 2, 3) ja halkaisija PhDi.
7) Korjaa virheet taulukon 3 menetelmällä.
Toista vaiheita 6 - 7, kunnes koneistusvirheet ovat tarkkuusalueella ja referenssityökalu on pysähtynyt ohjelman aloituspisteeseen eikä liiku.
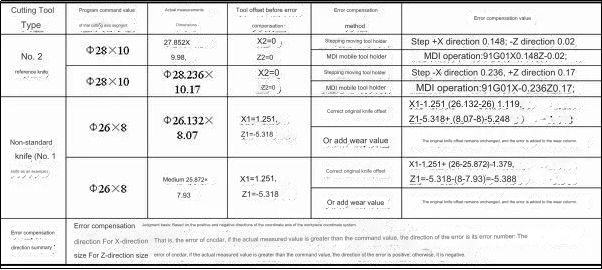
Taulukko 3 Esimerkki virheen kompensoinnista sylinterimäisten akselisegmenttien automaattisessa koeleikkauksessa (yksikkö: mm).
2. Jokaisen työkalun aloitusasennon muuttaminen erikseen
Tämän menetelmän työkalun asetusperiaate on, että jokainen työkalu säätää aloituskohtaansa kohdistaen siten epäsuorasti samaan alkupisteeseen.
Työkalun asetusvaiheet näkyvät kuvassa 3.
Karkean työkalun kalibroinnin jälkeen No. Karkean työkalun kalibroinnin ja siirtymien kirjaamisen jälkeen referenssityökalun nro 2 tulee olla ohjelman alussa.
Ensimmäisen tarkan työkalun asetusmenetelmän vaiheet 2) - (5) ovat identtiset.
Käytä O1000-ohjelmaa koeleikkauksen suorittamiseen. Mittaa kunkin osan pituus Li ja halkaisija PhDi.
Askelliiketyökalu tai MDI-työkalun pidike kompensoi virheet ja säätää kunkin työkalun ohjelman aloituspistettä.
Toista vaiheita (6), kunnes jokaisen ei-standardityökalun aloituskohta on sallitulla tarkkuusalueella.
Työkalun siirtymätaulukkoon pääsee syöttämällä CRT:ssä näkyvät suhteelliset koordinaatit sarakkeeseen X offset ja Z offset, jotka vastaavat työkalun siirtymän numeroa. Tämä menetelmä on kätevä ja yksinkertainen. Tämä menetelmä on yksinkertainen ja kätevä.
3. Muokkaa kaikkia ei-standardityökalujen offset-menetelmiä samalla hetkellä työkalun referenssiohjelman aloitusaseman muuttamisen jälkeen.
Menetelmä on sama kuin ensimmäisessä tarkassa työkalun asetusmenetelmässä. Ainoa ero näiden kahden välillä on, että vaiheessa 7 kutsutaan O1003-ohjelma, joka kutsuu kolmea veistä samanaikaisesti (O1004 poistaa numeron. O1003-ohjelma korvaa työkalun käsittelyn osan nro 2. Muut vaiheet ovat identtisiä.
6. Tällä menetelmällä voidaan korjata neljä veistä kerralla
Koneistusvirheen selvittämiseksi mittaa kunkin lohkon halkaisija PhDi ja kunkin osan pituus Li (i=2, 1, 4) käyttämällä suhteellista työkalusiirtymämenetelmää. Käytä MDI:tä tai asteittaista liikettä työkalunpitimeen referenssityökalua varten. Muokkaa ohjelman aloituspistettä. Epästandardien työkalujen kohdalla korjaa ensin siirtymä käyttämällä alkuperäistä siirtymää. Syötä sitten uusi offset. Myös referenssityökalun koneistusvirhe on syötettävä kulumissarakkeeseen. Soita O1005-koeleikkausohjelmaan, jos työkalun kalibrointiin käytetään työkalun absoluuttista siirtymää. Korjaa sitten työkalujen koneistusvirheet niiden vastaavien työkalupoikkeamanumeroiden kulumissarakkeissa.
Miten oikean työkalun asetustavan valinta CNC-sorveille vaikuttaa laatuun?CNC-työstöosat?
Tarkkuus ja tarkkuus:
Leikkuutyökalut on kohdistettu oikein, jos työkalu on asetettu oikein. Tämä vaikuttaa suoraan koneistustoimintojen tarkkuuteen. Väärä työkaluasetus voi johtaa mittavirheisiin, huonoihin pintojen viimeistelyyn ja jopa romuun.
Johdonmukaisuus:
Tasaiset työkaluasetukset varmistavat koneistustoimintojen yhtenäisyyden ja tasaisen laadun useissa osissa. Se vähentää pintakäsittelyn ja mittojen vaihtelua ja auttaa pitämään tiukat toleranssit.
Työkalun käyttöikä ja työkalujen kuluminen:
Varmistamalla, että työkalu on kunnolla kiinni työkappaleessa, oikea työkaluasetus voi pidentää työkalun käyttöikää. Väärät työkaluasetukset voivat johtaa työkalujen liialliseen kulumiseen ja rikkoutumiseen, mikä lyhentää työkalun käyttöikää.
Tuottavuus ja tehokkuus
Tehokkaat työkalun asetustekniikat voivat lyhentää koneen asetusaikaa ja lisätä käytettävyyttä. Se lisää tuottavuutta minimoimalla tyhjäkäyntiajat ja maksimoimalla leikkausajan. Tämä mahdollistaa nopeammat työkalunvaihdot ja lyhentää kokonaistyöstöaikoja.
Käyttäjän turvallisuus
Käyttäjän turvallisuuteen voi vaikuttaa valitsemalla oikea työkalun asetustapa. Jotkut menetelmät, kuten kuvantunnistus tai lasertyökalumittaus, poistavat tarpeen käsitellä työkaluja manuaalisesti, mikä vähentää loukkaantumisriskiä.
Anebonin tavoitteena on ymmärtää valmistuksen erinomaisia muodonmuutoksia ja tarjota huipputukea kotimaisille ja ulkomaisille asiakkaille koko sydämestäni vuodelle 2022 Korkealaatuinen ruostumaton teräs alumiini, korkea tarkkuus mittatilaustyönäCNC-sorvaus, Jyrsintä,cnc varaosatAerospace Laajentaakseen kansainvälisiä markkinoitamme Anebon toimittaa pääasiassa merentakaisille asiakkaillemme laadukkaita mekaanisia osia, jyrsittyjä osia ja cnc-sorvauspalvelua.
Kiinalainen tukkumyynti China Machinery Parts ja CNC-työstöpalvelu, Anebon tukee "innovoinnin, harmonian, ryhmätyön ja jakamisen, polkujen, käytännöllisen edistymisen henkeä". Anna meille mahdollisuus, niin aiomme todistaa kykymme. Ystävällisellä avullasi Anebon uskoo, että voimme luoda valoisan tulevaisuuden kanssasi yhdessä.
Postitusaika: 19.10.2023