
1. Koneistuskeskuksen Z-suuntainen työkaluasetus
Koneistuskeskusten Z-suuntaiseen työkalun asettamiseen on yleensä kolme tapaa:
1) Konetyökalun asetusmenetelmä 1
Tällä työkalun asetusmenetelmällä määritetään peräkkäin kunkin työkalun ja työkappaleen välinen keskinäinen sijaintisuhde työstökoneen koordinaattijärjestelmässä työkalun asettamisen avulla.CNC-työstöosatjaCNC-sorvausosat. Sen erityiset toimintavaiheet ovat seuraavat.
(1) Vertaa työkalun pituuksia, selvitä pisin työkalu referenssityökaluksi, suorita Z-suuntainen työkalun asetus ja käytä työkalun asetusarvoa (C) tällä hetkellä työkappaleen koordinaattijärjestelmän Z-arvona ja H03= 0 tällä hetkellä.
(2) Asenna työkalut T01 ja T02 vuorotellen karaan ja määritä A:n ja B:n arvot pituuskompensaatioarvoiksi työkalun asetuksella. (Tämä menetelmä ei mittaa suoraan työkalun korjausta, mutta eroaa menetelmästä 3, joka määritetään peräkkäisellä työkalun asetuksella.)
(3) Täytä määritetty pituuskorjausarvo (pisin työkalun pituus miinus työkalun jäljellä oleva pituus) asetussivulle. Positiiviset ja negatiiviset merkit määritetään ohjelmassa G43:lla ja G44:llä, ja tällä hetkellä sitä edustaa yleensä G44H—. G43:a käytettäessä pituuskompensaatio on negatiivinen arvo.
Tällä työkaluasetusmenetelmällä on korkea työkalun asetustehokkuus ja -tarkkuus sekä pienemmät investoinnit, mutta prosessidokumenttien kirjoittaminen on hankalaa, millä on tietty vaikutus tuotannon organisointiin.
2) Konetyökalun asetusmenetelmä 2
Tämän työkalun asetusmenetelmän erityiset toimintavaiheet ovat seuraavat:
(1) XY-suunnan kohdistusasetus on sama kuin aiemmin, syötä offset-arvo G54:n XY-kohdassa ja aseta Z-kohta nollaan.
(2) Vaihda työstössä käytetty T1 pääakseliin, käytä lohkomittaria Z-suunnan kohdistamiseen, lue työstökoneen koordinaattijärjestelmän Z-arvo Z1 sen jälkeen, kun tiiviys on sopiva, ja täytä pituuskompensaatioarvo H1 sen jälkeen. vähennetään lohkomittarin korkeus.
(3) Asenna T2 pääakselille, kohdista se lohkomittarin kanssa, lue Z2, vähennä lohkotulkin korkeus ja täytä H2.
(4) Käytä analogisesti lohkomittareita kaikkien työkalun runkojen kohdistamiseen ja täytä Hi, kun olet vähentänyt lohkomittarien korkeutta.
(5) Käytä ohjelmoinnissa seuraavia kompensointimenetelmiä:
T1;
G91 G30 Z0;
M06;
G43 H1;
G90 G54 G00 X0 Y0;
Z100;
…(Seuraava on työkalun nro 1 työkalun käsittely loppuun asti)
T2;
G91 G30 Z0;
M06;
G43 H2;
G90 G54 G00 X0 Y0;
Z100;
…(Kaikki veitsen nro 2 käsittelysisältö)
…M5;
M30;
3) Off-machine työkalun esiasetus + koneen työkalun asetus
Tämä työkalun asetustapa on käyttää työkalun esiasetinta jokaisen työkalun aksiaali- ja radiaalimittojen tarkkaan mittaamiseen työstökoneen ulkopuolella, määrittää kunkin työkalun pituuskompensaatioarvo ja käyttää sitten työstökoneen pisintä työkalua suorittamaan Z To työkalun asetus, määritä työkappaleen koordinaattijärjestelmä.
Tällä työkalun asetusmenetelmällä on korkea työkalun asetustarkkuus ja tehokkuus, ja se on kätevä prosessidokumenttien valmisteluun ja tuotannon organisointiin, mutta investointi on suhteellisen suuri.
2. Työkalun asetustietojen syöttäminen
(1) Yllä olevien toimintojen mukaisesti saadut työkalun asetustiedot eli ohjelmointikoordinaattijärjestelmän origon X-, Y- ja Z-arvot koneen koordinaatistossa on syötettävä manuaalisesti G54-G59:ään tallennusta varten. Toiminnan vaiheet ovat seuraavat:
①Paina【MENU OFFSET】painiketta.
②Paina kohdistinnäppäintä siirtyäksesi kohtaanCNC-jyrsintäosatjaCNC-sorvausosatkoordinaattijärjestelmä G54~G59 käsiteltäväksi.
③Paina【X】näppäintä syöttääksesi X-koordinaattiarvon.
④Paina【INPUT】painiketta.
⑤Paina【Y】näppäintä syöttääksesi Y-koordinaattiarvon.
⑥Paina【INPUT】painiketta.
⑦Paina【Z】näppäintä syöttääksesi Z-koordinaattiarvon.
⑧Paina【INPUT】painiketta.
(2) Työkalun kompensointiarvo syötetään yleensä koneeseen ennen ohjelman virheenkorjausta MDI:llä (manuaalinen tietojen syöttö). Yleiset toimintavaiheet ovat seuraavat:
①Paina【MENU OFFSET】painiketta.
②Paina kohdistimen liikenäppäintä kompensointinumeron kohdalle.
③Syötteen kompensointiarvo.
④Paina【INPUT】painiketta.
3. Kokeiluleikkausmenetelmä veitsen asettamiseen
Koeleikkausmenetelmä on yksinkertainen työkalun asetusmenetelmä, mutta se jättää jälkiä työkappaleeseen ja työkalun asetustarkkuus on alhainen. Se soveltuu työkalun säätöön osien karkean työstön aikana. Sen työkalun asetusmenetelmä on sama kuin mekaanisen reunamittarin.
4. Vipumittarin työkalun asetus
Vipuvalitsimen työkalun asetustarkkuus on korkea, mutta tämä toimintatapa on hankala ja tehokkuus alhainen. Se sopii viimeistelyreiän (pinnan) työkaluasetukseen, mutta ei sovellu karkeaan työstöreikään.
Työkalun asetusmenetelmä on seuraava: vedä magneettikellon alustalla vipuvalitsimen osoitin koneistuskeskuksen karaan ja aseta mittapää lähelle reiän seinämää (tai sylinterimäistä pintaa). Virheen sisällä, kuten 0,02, voidaan katsoa, että karan kiertokeskipiste on tällä hetkellä sama kuin mitatun reiän keskipiste, ja syöttää tällä hetkellä koneen koordinaattijärjestelmän X- ja Y-koordinaattiarvot G54:ään.
5. Työkalun säätö Z-suunnassa
Työkaluasetuksen valmistettavuus huomioon ottaen työkappaleen koordinaattijärjestelmän Z-suunnan origoksi otetaan yleensä työkappaleen yläpinta. Kun kappaleen yläpinta on suhteellisen karkea eikä sitä voi käyttää työkalun asetusreferenssinä, voidaan ruuvipuristinta tai työpenkkiä käyttää myös työkappaleen koordinaattijärjestelmän Z-suunnan origoina ja sitten korjataan työkappaleen korkeus. ylöspäin G54- tai laajennetussa koordinaattijärjestelmässä täytettäväksi. Z-suuntainen työstökoneasetus sisältää pääasiassa Z-suuntaisen mittauslaitteen työkalun säädön, työkalun asetuslohkon työkalun säädön ja koeleikkausmenetelmän työkalun säädön ja muita menetelmiä.
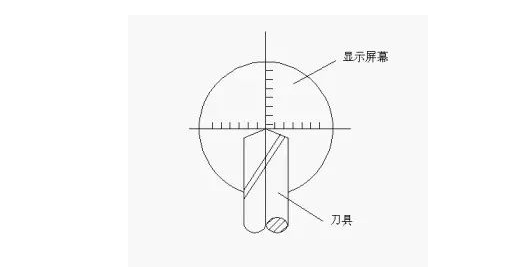
6. Työkalun asetus Z-suuntaisella mittauslaitteella
Z-suuntaisen mittauslaitteen työkalun asetustarkkuus on korkea, varsinkin kun koneeseen on asetettu useita työkaluja jyrsintäkeskuksessa, työkalun asetusteho on korkea, investointi pieni ja se sopii yksiosaiseen osaan käsittelyä.
1) Z-suunnan työkalun asetus koneistuskeskuksen yhden työkalun työstyksessä
Yhden työkalun koneistus koneistuskeskuksessa on samankaltainen ongelma kuin se, että CNC-jyrsinkoneessa ei ole työkalun asetuksessa pituuskompensaatiota. Vaiheet ovat seuraavat:
(1) Vaihda työstössä käytettävä työkalu;
(2) Siirrä työkalu työkappaleen yläosaan, mittaa työkappaleen ja työkalun välinen etäisyys Z-suuntaisella mittauslaitteella ja tallenna nykyisen työstökoneen (mekaanisen) koordinaattijärjestelmän Z-akselin lukema Z;
(3) Vähennä Z-arvo Z-suunnan mittauslaitteen korkeudesta tällä hetkellä (esim. 50,03 mm) ja täytä sitten mitattu arvo Z-kohtaan OFFSETTING–>koordinaattijärjestelmä–>G54;
(4) Suorita G90 G54G0 X0 Y0 Z100; tarkista onko kohdistus oikea
Postitusaika: 09.01.2023