
Γνωρίζετε πόσες μέθοδοι υπάρχουν για ακριβή ρύθμιση εργαλείων σε τόρνους CNC;
Μέθοδος ανίχνευσης αφής: - Αυτή η μέθοδος χρησιμοποιεί έναν αισθητήρα που αγγίζει το εργαλείο για να μετρήσει τη θέση του σε σχέση με το σημείο αναφοράς του μηχανήματος. Δίνει ακριβή δεδομένα για τη διάμετρο και το μήκος του εργαλείου.
Προκαθορισμός εργαλείου:Για τη μέτρηση των διαστάσεων του εργαλείου έξω από το μηχάνημα χρησιμοποιείται ένα εξάρτημα προκαθορισμού εργαλείου. Αυτή η μέθοδος επιτρέπει γρήγορη και ακριβή ρύθμιση του εργαλείου.
Μέθοδος μετατόπισης εργαλείου:– Σε αυτή τη μέθοδο, ένας χειριστής μετρά το μήκος και τη διάμετρο του εργαλείου χρησιμοποιώντας εργαλεία όπως δαγκάνες και μικρόμετρα. Στη συνέχεια, οι τιμές εισάγονται στο σύστημα ελέγχου του μηχανήματος.
Μέτρηση εργαλείου λέιζερ:Τα συστήματα λέιζερ χρησιμοποιούνται για τον καθορισμό και τη μέτρηση των διαστάσεων του εργαλείου. Προβάλλοντας μια δέσμη φωτός λέιζερ στην κοπτική άκρη του εργαλείου, παρέχουν ακριβή και γρήγορα δεδομένα εργαλείου.
Μέθοδος αναγνώρισης εικόνας:Τα προηγμένα συστήματα υπολογιστών μπορούν να χρησιμοποιούν τεχνολογία αναγνώρισης εικόνας για να υπολογίζουν αυτόματα τις διαστάσεις του εργαλείου. Αυτό το κάνουν παίρνοντας εικόνες του εργαλείου, αναλύοντας τα χαρακτηριστικά του και στη συνέχεια υπολογίζοντας τις μετρήσεις.
Αυτό είναι ένα πολύ χρήσιμο άρθρο. Το άρθρο εισάγει πρώτα τις αρχές και τις ιδέες πίσω από τη «μέθοδο ρύθμισης εργαλείων δοκιμαστικής κοπής» που χρησιμοποιείται συνήθως στους τόρνους CNC. Στη συνέχεια, εισάγει τέσσερις χειροκίνητες μεθόδους ρυθμίσεων δοκιμαστικού εργαλείου κοπής για συστήματα τόρνευσης CNC. Για να βελτιωθεί η ακρίβεια των ρυθμίσεων του εργαλείου του, αναπτύχθηκε μια ελεγχόμενη από πρόγραμμα αυτόματη δοκιμαστική μέθοδος κοπής που βασίζεται στην «αυτόματη κοπή – μέτρηση – αντιστάθμιση σφαλμάτων». Έχουν επίσης συνοψιστεί τέσσερις ακριβείς μέθοδοι ρύθμισης εργαλείων.
1. Η αρχή και οι ιδέες πίσω από τη μέθοδο ρύθμισης εργαλείων για τόρνους CNC
Η κατανόηση των αρχών ρύθμισης εργαλείων τόρνου CNC είναι σημαντική για χειριστές που θέλουν να διατηρούν σαφείς ιδέες σχετικά με τη ρύθμιση εργαλείων, να κυριαρχούν στις λειτουργίες ρύθμισης εργαλείων και να προτείνουν νέες μεθόδους. Η ρύθμιση εργαλείου καθορίζει τη θέση προέλευσης του συστήματος συντεταγμένων του τεμαχίου εργασίας, η οποία αλλάζει κατά τον προγραμματισμό του συστήματος συντεταγμένων εργαλειομηχανών. Η ρύθμιση εργαλείου περιλαμβάνει τη λήψη των συντεταγμένων του μηχανήματος για το σημείο εκκίνησης ενός προγράμματος εργαλείου αναφοράς και τον προσδιορισμό της μετατόπισης του εργαλείου σε σχέση με αυτό το εργαλείο.
Οι ακόλουθες συμβάσεις χρησιμοποιούνται για την επίδειξη των εννοιών και των ιδεών πίσω από τη ρύθμιση εργαλείων χρησιμοποιώντας τη δοκιμαστική μέθοδο κοπής. Χρησιμοποιήστε το Hua Medieval Star Teaching Turning System (αριθμός έκδοσης 5.30 του λογισμικού εφαρμογής). χρησιμοποιήστε το κέντρο της δεξιάς ακραίας όψης στο τεμάχιο εργασίας για την αρχή του προγράμματος και ρυθμίστε το με την εντολή G92. Προγραμματισμός διαμέτρου, οι συντεταγμένες του κομματιού εργασίας του σημείου έναρξης του προγράμματος H είναι (100,50). τοποθετήστε τέσσερα εργαλεία στη βάση εργαλείων. Το εργαλείο No.1 είναι ένα τραχύ εργαλείο στροφής 90 μοιρών και το εργαλείο No. Reference 2 είναι ένα εργαλείο λεπτής στροφής εξωτερικού κύκλου 90 μοιρών. μαχαίρι, Όχι. Όχι. Το 4ο μαχαίρι είναι ένα τριγωνικό μαχαίρι με σπείρωμα με γωνία 60 μοιρών (τα παραδείγματα στο άρθρο είναι όλα τα ίδια).
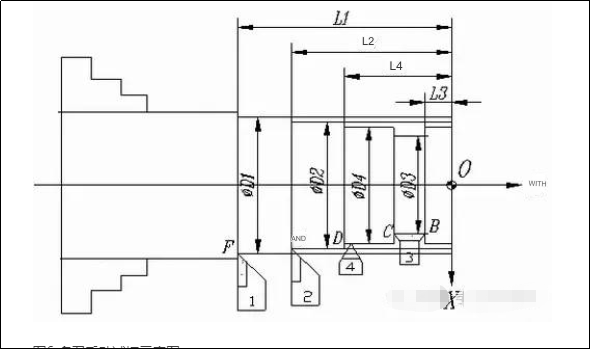
Οι συντεταγμένες "εργαλειομηχανή" χρησιμοποιούνται για τη ρύθμιση του εργαλείου. Όπως φαίνεται στο σχήμα 1, το εργαλείο αναφοράς «κόβει χειροκίνητα τον εξωτερικό κύκλο και την τελική επιφάνεια του τεμαχίου εργασίας και καταγράφει τις συντεταγμένες εργαλειομηχανής XZ στην οθόνη. Οι συντεταγμένες εργαλειομηχανών για την αρχή του προγράμματος Ο προέρχονται από τη σχέση μεταξύ των συντεταγμένων εργαλειομηχανών στο σημείο Α και Ο: XO=XA – Phd, ZO=ZA. Χρησιμοποιώντας τις συντεταγμένες του τεμαχίου για H σε σχέση με το σημείο O (100,50), μπορούμε τελικά να εξαγάγουμε τις συντεταγμένες εργαλειομηχανής για το σημείο H: XH=100 – Phd, ZH=ZA+50. Αυτό το σύστημα συντεταγμένων του τεμαχίου εργασίας βασίζεται στη θέση του άκρου του εργαλείου στο εργαλείο αναφοράς.
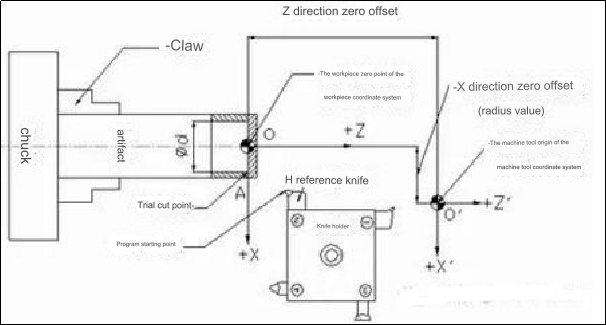
Εικόνα 1 Σχηματικό διάγραμμα για χειροκίνητη δοκιμαστική κοπή και ρυθμίσεις εργαλείου
Στο Σχήμα 2, η μετατόπιση μεταξύ του σημείου Α και του άκρου του εργαλείου Β συμβαίνει λόγω των διαφορών στις προεκτάσεις και τις θέσεις στην κατεύθυνση Χ και Ζ των εργαλείων που είναι σφιγμένα στη θήκη εργαλείου. Το αρχικό σύστημα συντεταγμένων για το τεμάχιο εργασίας δεν είναι πλέον έγκυρο. Κάθε εργαλείο θα φθείρεται επίσης με διαφορετικό ρυθμό κατά τη χρήση. Επομένως, οι μετατοπίσεις και οι τιμές φθοράς του εργαλείου για κάθε εργαλείο πρέπει να αντισταθμίζονται.
Για να προσδιοριστεί η μετατόπιση του εργαλείου, κάθε εργαλείο πρέπει να ευθυγραμμιστεί σε ένα συγκεκριμένο σημείο αναφοράς (σημείο A ή B στο σχήμα 1) στο τεμάχιο εργασίας. Το CRT εμφανίζει συντεταγμένες εργαλειομηχανών που διαφέρουν από τις μετατοπίσεις εργαλείων των εργαλείων μη αναφοράς. Επομένως, τοποθετούνται στο ίδιο σημείο. Χρησιμοποιώντας χειροκίνητους υπολογισμούς ή υπολογισμούς λογισμικού, οι συντεταγμένες της εργαλειομηχανής αφαιρούνται από αυτές του εργαλείου αναφοράς. Στη συνέχεια, η μετατόπιση εργαλείου υπολογίζεται για κάθε μη τυπική συσκευή.
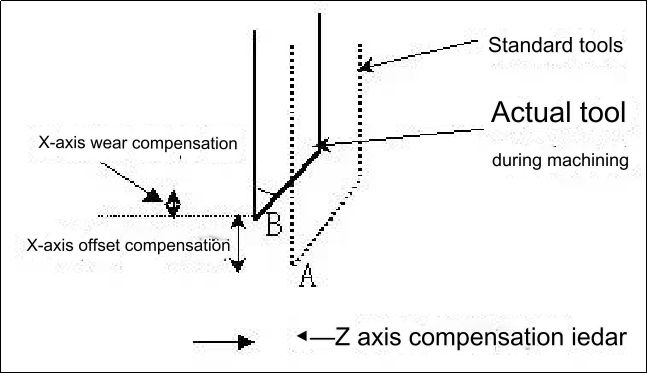
Εικόνα 2 Αντιστάθμιση για μετατόπιση και φθορά εργαλείου
Η ακρίβεια των ρυθμίσεων χειροκίνητου δοκιμαστικού εργαλείου κοπής είναι περιορισμένη. Αυτό είναι γνωστό ως τραχύ εργαλείο. Όπως φαίνεται στο Σχήμα 3, για να επιτευχθούν πιο ακριβή αποτελέσματα εντός των περιθωρίων μηχανικής κατεργασίας τουcnc ανταλλακτικό αυτοκινήτου, μπορεί να σχεδιαστεί ένα απλό αυτοματοποιημένο δοκιμαστικό πρόγραμμα κοπής. Το μαχαίρι αναφοράς τροποποιείται συνεχώς χρησιμοποιώντας την έννοια της «αυτόματης αντιστάθμισης κοπής-μέτρησης-λάθους». Η μετατόπιση εργαλείου και το σημείο έναρξης προγράμματος του εργαλείου μη αναφοράς χρησιμοποιούνται για να διασφαλιστεί ότι η διαφορά μεταξύ της τιμής της εντολής επεξεργασίας και της πραγματικής μετρούμενης τιμής πληροί τις απαιτήσεις ακρίβειας. Η ρύθμιση εργαλείου ακριβείας είναι η ρύθμιση εργαλείου που εμφανίζεται σε αυτό το στάδιο.
Είναι σύνηθες να διορθώνονται οι μη τυπικές μετατοπίσεις μετά την αρχική διόρθωση. Αυτό συμβαίνει επειδή η διασφάλιση της ακριβούς θέσης του σημείου εκκίνησης του εργαλείου αναφοράς αποτελεί προϋπόθεση για ακριβείς μετατοπίσεις του εργαλείου.
Αυτή η βασική διαδικασία ρύθμισης εργαλείου επιτυγχάνεται συνδυάζοντας αυτά τα δύο στάδια: δοκιμάστε να κόψετε το μαχαίρι με το χέρι με την αναφορά για να λάβετε συντεταγμένες εργαλειομηχανής για την αναφορά ρύθμισης εργαλείου. – Υπολογίστε ή υπολογίστε αυτόματα τις μετατοπίσεις εργαλείων κάθε εργαλείου μη αναφοράς. – Το μαχαίρι αναφοράς βρίσκεται στην κατά προσέγγιση έναρξη του προγράμματος. – Το μαχαίρι αναφοράς καλεί επανειλημμένα το δοκιμαστικό πρόγραμμα κοπής. Το στήριγμα εργαλείου θα μετακινηθεί σε λειτουργία MDI ή βήμα για να αντισταθμίσει τα σφάλματα και να διορθώσει τη θέση του σημείου εκκίνησης. Μετά τη μέτρηση του μεγέθους, το μαχαίρι χωρίς βάση θα καλέσει επανειλημμένα το δοκιμαστικό πρόγραμμα κοπής. Η μετατόπιση εργαλείου διορθώνεται με βάση αυτή τη μετατόπιση. Αυτό σημαίνει ότι το εργαλείο αναφοράς θα είναι ακίνητο στην ακριβή έναρξη του προγράμματος.
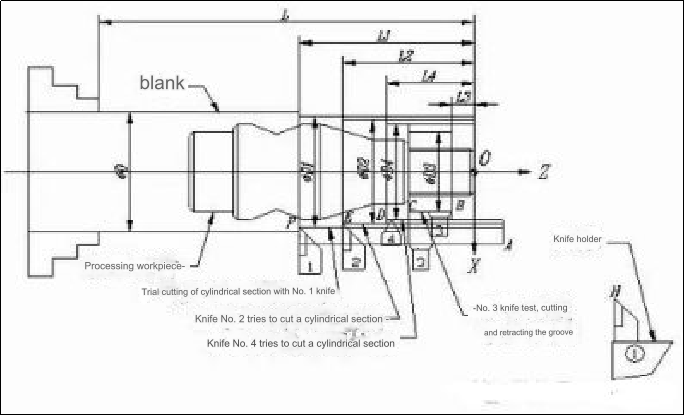
Εικόνα 3 Σχηματικό διάγραμμα ρύθμισης εργαλείου για δοκιμαστική κοπή πολλαπλών μαχαιριών
Επισκόπηση των τεχνικών ρύθμισης ακατέργαστων μαχαιριών
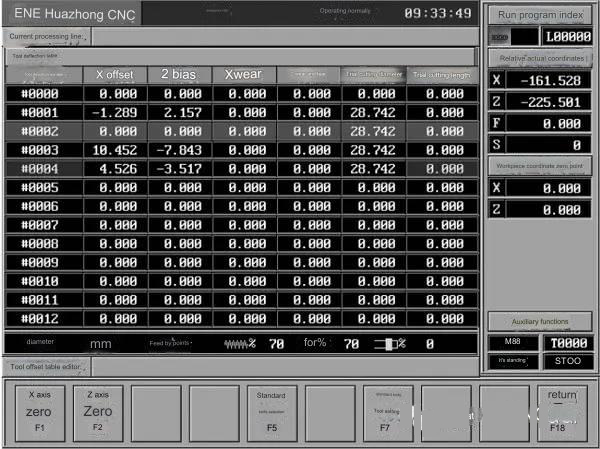
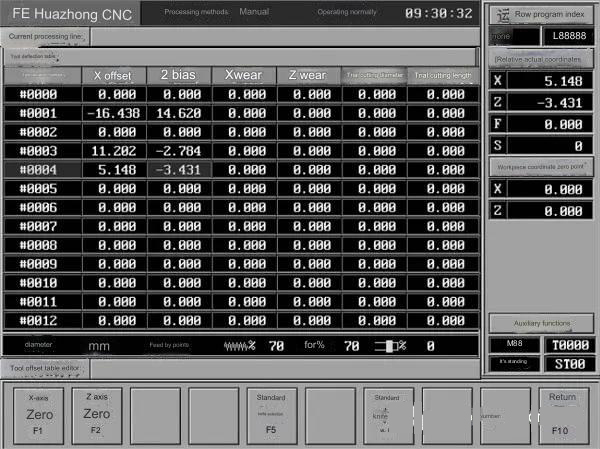
Για να προετοιμαστείτε για τη ρύθμιση του εργαλείου, μπορείτε να χρησιμοποιήσετε οποιαδήποτε από τις ακόλουθες μεθόδους: πατήστε το πλήκτρο F2 στο υπομενού του συστήματος MDI για πρόσβαση στον πίνακα μετατόπισης εργαλείου. Χρησιμοποιήστε τα πλήκτρα για να μετακινήσετε τη γραμμή επισήμανσης στη θέση αριθμού εργαλείου που αντιστοιχεί σε κάθε εργαλείο και πατήστε το κουμπί F5. Τροποποιήστε τις τιμές μετατόπισης X και Z των αριθμών μετατόπισης εργαλείου #0000 και #0001 και, στη συνέχεια, πατήστε το πλήκτρο F5.
1) Ρυθμίστε αυτόματα τη μέθοδο μετατόπισης εργαλείου επιλέγοντας το εργαλείο αναφοράς.
Τα βήματα για τη ρύθμιση του εργαλείου φαίνονται στα σχήματα 1 και 4.
Η μπλε γραμμή που επισημαίνεται με τα πλήκτρα μπορεί να μετακινηθεί για να ευθυγραμμιστεί η μετατόπιση εργαλείου #0002 για το εργαλείο αναφοράς Νο. 2. Εργαλείο αναφοράς 2. Για να ορίσετε τον αριθμό 2, πατήστε το πλήκτρο F5. Το εργαλείο 2 θα οριστεί ως το προεπιλεγμένο εργαλείο.
2) Κόψτε τον εξωτερικό κύκλο με το εργαλείο αναφοράς και σημειώστε τις συντεταγμένες Χ μηχανής-εργαλειομηχανής. Αφού ανασύρετε το εργαλείο, σταματήστε το μηχάνημα και μετρήστε την εξωτερική διάμετρο του τμήματος του άξονα.
3) Η λεπίδα αναφοράς επιστρέφει στο σημείο Α που καταγράφεται με τη μέθοδο «jog+step». Εισαγάγετε PhD και μηδέν στις στήλες για τη διάμετρο κοπής του τεστ και το μήκος κοπής του τεστ αντίστοιχα.
4) Ανασύρετε το τυπικό εργαλείο και επιλέξτε τον αριθμό του μη τυπικού εργαλείου. Στη συνέχεια, αλλάξτε χειροκίνητα το εργαλείο. Η άκρη του εργαλείου για κάθε μη τυποποιημένο εργαλείο θα πρέπει να ευθυγραμμιστεί οπτικά με το σημείο Α χρησιμοποιώντας τη μέθοδο «jog+step». Προσαρμόστε την αντίστοιχη μετατόπιση αφού το εργαλείο ευθυγραμμιστεί οπτικά. Εάν εισαγάγετε μηδέν και PhD στις στήλες για το δοκιμαστικό μήκος και τη διάμετρο κοπής, οι μετατοπίσεις μαχαιριών όλων των μη αναφοράς μαχαιριών θα εμφανίζονται αυτόματα στη στήλη μετατόπισης X και μετατόπισης Z.
5) Μόλις το εργαλείο αναφοράς επιστρέψει στο σημείο Α, το MDI θα εκτελέσει το "G91 G00/ή" G01 X[100 PhD] Z50 για να φτάσει στο σημείο εκκίνησης του προγράμματος.
Εικόνα 4 Σχηματικό διάγραμμα του εργαλείου αναφοράς που ρυθμίζει αυτόματα τη μετατόπιση εργαλείου για το τυπικό εργαλείο
2. Ρυθμίστε τις συντεταγμένες του εργαλείου αναφοράς στο μηδέν στο σημείο αναφοράς ρύθμισης εργαλείου και εμφανίστε αυτόματα τη μέθοδο μετατόπισης εργαλείου
Όπως φαίνεται στο Σχήμα 1 και στο Σχήμα 5, τα βήματα ρύθμισης του εργαλείου είναι τα εξής:
1) Ίδιο με το βήμα (2) παραπάνω.
2) Το μαχαίρι αναφοράς επιστρέφει στο δοκιμαστικό σημείο κοπής Α μέσω της μεθόδου «jog + step» σύμφωνα με την καταγεγραμμένη τιμή.
3) Στη διεπαφή που φαίνεται στην Εικόνα 4, πατήστε το πλήκτρο F1 για να «ρυθμίσετε τον άξονα X στο μηδέν» και πατήστε το πλήκτρο F2 για να «ρυθμίσετε τον άξονα Z στο μηδέν». Τότε οι «σχετικές πραγματικές συντεταγμένες» που εμφανίζονται από το CRT είναι (0, 0).
4) Αλλάξτε χειροκίνητα το εργαλείο μη αναφοράς, ώστε η άκρη του εργαλείου του να ευθυγραμμίζεται οπτικά με το σημείο Α. Αυτή τη στιγμή, η τιμή των «σχετικών πραγματικών συντεταγμένων» που εμφανίζεται στο CRT είναι η μετατόπιση εργαλείου του εργαλείου σε σχέση με το εργαλείο αναφοράς. Χρησιμοποιήστε τα πλήκτρα ▲ και για να μετακινήσετε το μπλε Επισημάνετε τον αριθμό μετατόπισης εργαλείου του εργαλείου μη αναφοράς, καταγράψτε το και εισάγετέ το στην αντίστοιχη θέση.
5) Ίδιο με το προηγούμενο βήμα (5).
Σχήμα 5 Σχηματικό διάγραμμα της μετατόπισης εργαλείου εμφανίζεται αυτόματα όταν το Εργαλείο αναφοράς είναι μηδενικό στις συντεταγμένες των σημείων αναφοράς της ρύθμισης εργαλείου.
3. Η μέθοδος μετατόπισης μαχαιριού υπολογίζεται με χειροκίνητο υπολογισμό της δοκιμαστικής κοπής με πολλαπλά μαχαίρια του εξωτερικού τμήματος κυκλικού άξονα.
Όπως φαίνεται στο σχήμα 6, το σύστημα ευθυγραμμίζει χειροκίνητα τα μαχαίρια 1, 2 και 4 και κόβει έναν άξονα. Στη συνέχεια καταγράφει τις συντεταγμένες του μηχανήματος για τα άκρα κοπής κάθε μαχαιριού. (Σημεία F, D και E στο σχήμα 6). Μετρήστε τη διάμετρο και το μήκος για κάθε τμήμα. Αντικαταστήστε το Νο. 1 μαχαίρι κοπής. Όπως φαίνεται στην εικόνα, κόψτε μια εσοχή εργαλείου. Ευθυγραμμίστε τη λεπίδα κοπής με τη δεξιά άκρη, καταγράψτε τις συντεταγμένες για το σημείο Β και μετρήστε τα L3 και PhD3 σύμφωνα με το σχήμα. Η επαυξητική σχέση συντεταγμένων μεταξύ των σημείων F, E και D για κάθε εργαλείο και της αρχής O μπορεί να προσδιοριστεί συγκρίνοντας τα παραπάνω δεδομένα.
Στη συνέχεια, μπορεί να φανεί ότι οι συντεταγμένες εργαλειομηχανών είναι (X2-PhD2+100 και Z2-L2+50) και οι συντεταγμένες εργαλειομηχανών για το σημείο εκκίνησης του προγράμματος που αντιστοιχεί στο εργαλείο αναφοράς. Η μέθοδος υπολογισμού φαίνεται στον πίνακα 1. Στα κενά, εισαγάγετε τις υπολογιζόμενες και καταγεγραμμένες τιμές. Σημείωση: Η δοκιμαστική απόσταση κοπής είναι η απόσταση μεταξύ του μηδενικού σημείου συντεταγμένων του τεμαχίου εργασίας και του τελικού σημείου της δοκιμαστικής κοπής στην κατεύθυνση Z. Οι θετικές και αρνητικές κατευθύνσεις καθορίζονται από τον άξονα συντεταγμένων.
Εικόνα 6 Σχηματικό διάγραμμα χειροκίνητης δοκιμαστικής κοπής με πολλά μαχαίρια
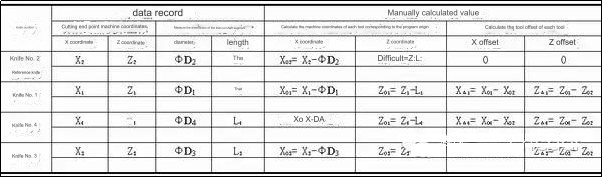
Πίνακας 1 Υπολογισμός μετατοπίσεων εργαλείων για μη τυποποιημένα Εργαλεία
Αυτή η μέθοδος επιτρέπει μια απλή δοκιμαστική διαδικασία κοπής, καθώς εξαλείφει την ανάγκη οπτικής ευθυγράμμισης των δοκιμαστικών σημείων κοπής. Ωστόσο, η μετατόπιση του μαχαιριού πρέπει να υπολογιστεί χειροκίνητα. Μπορείτε να υπολογίσετε γρήγορα τη μετατόπιση του εργαλείου εάν εκτυπώσετε το φύλλο με τον τύπο και στη συνέχεια συμπληρώσετε τα κενά.
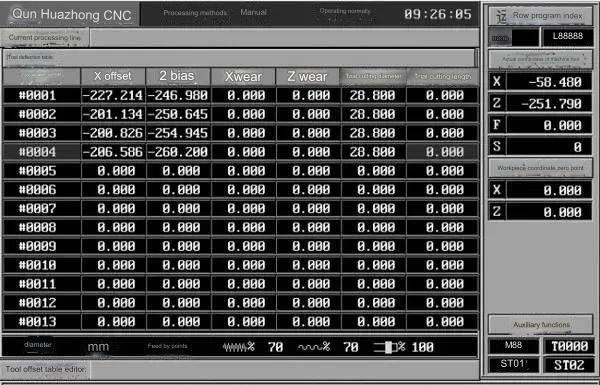
Εικόνα 7 Σχηματικό διάγραμμα για αυτόματη ρύθμιση εργαλείων στο σύστημα CNC Century Star
Μέθοδος αυτόματου σετ εργαλείων πολλαπλών εργαλείων για σύστημα CNC 4th Century Star
Όλες οι παραπάνω μέθοδοι για τη μετατόπιση εργαλείων είναι σχετικές μέθοδοι. Αφού το επαγγελματικό προσωπικό έχει πραγματοποιήσει τη ρύθμιση παραμέτρων και τον έλεγχο του συστήματος, το HNC-21T επιτρέπει στους χρήστες να επιλέξουν τη «μέθοδο απόλυτης μετατόπισης» κατά τη ρύθμιση των εργαλείων. Στον προγραμματισμό μηχανικής κατεργασίας, η απόλυτη μετατόπιση εργαλείου είναι λίγο διαφορετική από τη σχετική μέθοδο απενεργοποίησης εργαλείων. Δεν είναι απαραίτητο να χρησιμοποιήσετε G92 ή G54 για τα συστήματα συντεταγμένων του τεμαχίου εργασίας, ούτε είναι απαραίτητο να ακυρώσετε την αντιστάθμιση εργαλείου. Δείτε το πρόγραμμα O1005 για παράδειγμα. Όπως φαίνεται στο Σχήμα 6, αφού το σύστημα επιστρέψει στο μηδέν, αφήστε κάθε μαχαίρι να προσπαθήσει χειροκίνητα να κόψει ένα τμήμα κυλίνδρου.
Συμπληρώστε τους αριθμούς μετατόπισης εργαλείου για κάθε μαχαίρι αφού μετρήσετε το μήκος και τη διάμετρο. Το δοκιμαστικό μήκος κοπής αναγράφεται στη στήλη για τη δοκιμαστική διάμετρο κοπής. Το λογισμικό συστήματος, χρησιμοποιώντας τη μέθοδο που περιγράφεται στο «Multiknife Cutting of External Shaft Segment – Manual Calculation for Knife Offset», μπορεί να υπολογίσει αυτόματα τις συντεταγμένες εργαλειομηχανής για κάθε μαχαίρι ανάλογα με την προέλευση του προγράμματος. Αυτή η μέθοδος ρύθμισης εργαλείου είναι η ταχύτερη και είναι ιδιαίτερα κατάλληλη για βιομηχανική παραγωγή.
Σύνοψη πέντε ακριβών τεχνικών ρύθμισης εργαλείων
Η αρχή της ακριβούς ρύθμισης του εργαλείου είναι «αυτόματη μέτρηση, αυτόματη δοκιμαστική κοπή και αντιστάθμιση σφαλμάτων». Η αντιστάθμιση σφαλμάτων μπορεί να χωριστεί σε δύο κατηγορίες: Για τη λειτουργία του εργαλείου αναφοράς MDI, ή βήμα μετακινούμενους στύλους εργαλείου για αντιστάθμιση της αρχικής θέσης του προγράμματος. και για μη τυποποιημένο εργαλείο για να αντισταθμίσει τις τιμές μετατόπισης ή φθοράς του εργαλείου. Προς αποφυγή σύγχυσης, ο Πίνακας 2 έχει σχεδιαστεί για να υπολογίζει και να καταγράφει τιμές.
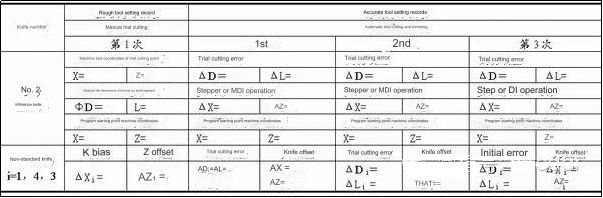
Πίνακας 2 Πίνακας καταγραφής ρύθμισης εργαλείου για δοκιμαστική μέθοδο κοπής (Μονάδα: mm
1. Τροποποιήστε τη μέθοδο μετατόπισης για κάθε μη τυπικό εργαλείο αφού το εργαλείο αναφοράς διορθώσει το σημείο εκκίνησης.
Τα βήματα για τη ρύθμιση του εργαλείου φαίνονται στο σχήμα 3.
Μετά την πρόχειρη βαθμονόμηση του εργαλείου, το εργαλείο αναφοράς θα πρέπει να βρίσκεται στην αρχή του προγράμματος. Εισαγάγετε τη μετατόπιση κάθε μη τυπικού εργαλείου στην κατάλληλη θέση του πίνακα.
Χρησιμοποιήστε το πρόγραμμα O1000 για να επεξεργαστείτε το PhD2xL2 για να κάνετε μια δοκιμαστική περικοπή.
Στη συνέχεια, μετρήστε τη διάμετρο και το μήκος του τμηματοποιημένου άξονα κοπής, συγκρίνετε τα με την τιμή στο πρόγραμμα εντολών και προσδιορίστε το σφάλμα.
Τροποποιήστε το σημείο έναρξης του προγράμματος εάν η τιμή σφάλματος MDI ή η κίνηση του βήματος είναι μεγαλύτερη από την τιμή σφάλματος MDI.
5) Τροποποιήστε την τιμή εντολής O1000 δυναμικά με βάση τις μετρούμενες διαστάσεις και αποθηκεύστε το πρόγραμμα. Επαναλάβετε τα βήματα (2) έως ότου η αρχική θέση του εργαλείου αναφοράς είναι εντός του εύρους ακρίβειας. Σημειώστε τις συντεταγμένες εργαλειομηχανής για το σημείο εκκίνησης του διορθωμένου προγράμματος. Ορίστε τις συντεταγμένες στο μηδέν.
6) Πληκτρολογήστε το O1001 (μαχαίρι αρ. 1, Νο. O1002 (μαχαίρι αρ. 3) για κάθε δοκιμαστική κοπή και μετρήστε το μήκος Li (i=1, 2, 3) και τη διάμετρο PhDi κάθε τμήματος.
7) Αντισταθμίστε τα σφάλματα χρησιμοποιώντας τη μέθοδο του πίνακα 3.
Επαναλάβετε τα βήματα 6 έως 7 έως ότου τα σφάλματα μηχανικής κατεργασίας είναι εντός του εύρους ακρίβειας και το εργαλείο αναφοράς σταματήσει στο σημείο έναρξης του προγράμματος και δεν μετακινηθεί.
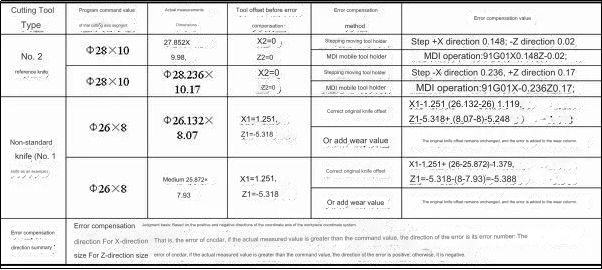
Πίνακας 3 Παράδειγμα αντιστάθμισης σφάλματος για αυτόματη δοκιμαστική κοπή κυλινδρικών τμημάτων άξονα (μονάδα: mm).
2. Τροποποίηση της αρχικής θέσης κάθε εργαλείου ξεχωριστά
Η αρχή ρύθμισης εργαλείων αυτής της μεθόδου είναι ότι κάθε εργαλείο προσαρμόζει το σημείο εκκίνησης του προγράμματος, ευθυγραμμίζοντας έτσι έμμεσα με την ίδια θέση προέλευσης.
Τα βήματα για τη ρύθμιση του εργαλείου φαίνονται στο σχήμα 3.
Μετά τη βαθμονόμηση ακατέργαστου εργαλείου, το Όχι. Μετά τη βαθμονόμηση ακατέργαστου εργαλείου και την καταγραφή των μετατοπίσεων, το εργαλείο αναφοράς Νο. 2 θα πρέπει να βρίσκεται στην αρχή του προγράμματος.
Τα βήματα 2) έως (5) της πρώτης μεθόδου ακριβούς ρύθμισης εργαλείων είναι πανομοιότυπα.
Χρησιμοποιήστε το πρόγραμμα O1000 για να εκτελέσετε μια δοκιμαστική κοπή. Μετρήστε το μήκος Li και τη διάμετρο PhDi κάθε τμήματος.
Το εργαλείο κίνησης βημάτων ή η θήκη εργαλείου MDI αντισταθμίζει τα σφάλματα και προσαρμόζει το σημείο εκκίνησης του προγράμματος κάθε εργαλείου.
Επαναλάβετε τα βήματα (6) έως ότου η αρχική θέση για κάθε μη τυπικό εργαλείο προγράμματος είναι εντός του επιτρεπόμενου εύρους ακρίβειας.
Ο πίνακας μετατόπισης εργαλείου μπορεί να προσπελαστεί εισάγοντας τις σχετικές συντεταγμένες που εμφανίζονται στο CRT στη στήλη μετατόπισης X και μετατόπισης Z που αντιστοιχεί στον αριθμό της μετατόπισης εργαλείου. Αυτή η μέθοδος είναι βολική και απλή. Αυτή η μέθοδος είναι απλή και βολική.
3. Τροποποιήστε όλες τις μεθόδους μετατόπισης για μη τυπικά εργαλεία την ίδια στιγμή μετά την τροποποίηση της θέσης έναρξης του προγράμματος αναφοράς εργαλείου.
Η μέθοδος είναι η ίδια με εκείνη της πρώτης μεθόδου ακριβούς ρύθμισης εργαλείων. Η μόνη διαφορά μεταξύ των δύο είναι ότι στο βήμα 7, καλείται το πρόγραμμα O1003, το οποίο καλεί τρία μαχαίρια ταυτόχρονα (το O1004 αφαιρεί το No. Το πρόγραμμα O1003 αντικαθιστά το Νο. 2 τμήμα της επεξεργασίας εργαλείων. Τα υπόλοιπα βήματα είναι πανομοιότυπα.
6. Τέσσερα μαχαίρια μπορούν να επισκευαστούν ταυτόχρονα χρησιμοποιώντας αυτή τη μέθοδο
Για να μάθετε το σφάλμα μηχανικής κατεργασίας, μετρήστε τη διάμετρο κάθε τμήματος, PhDi, και το μήκος κάθε τμήματος, Li (i=2, 1, 4), χρησιμοποιώντας τη μέθοδο σχετικής μετατόπισης εργαλείου. Χρησιμοποιήστε το MDI ή τη σταδιακή κίνηση προς την υποδοχή εργαλείου για το εργαλείο αναφοράς. Τροποποιήστε το σημείο έναρξης του προγράμματος. Για τα μη τυπικά εργαλεία, διορθώστε πρώτα τη μετατόπιση χρησιμοποιώντας την αρχική μετατόπιση. Στη συνέχεια, εισαγάγετε τη νέα μετατόπιση. Το σφάλμα κατεργασίας για το εργαλείο αναφοράς πρέπει επίσης να εισαχθεί στη στήλη φθοράς. Καλέστε το δοκιμαστικό πρόγραμμα κοπής O1005 εάν χρησιμοποιείται η απόλυτη μετατόπιση εργαλείου για τη βαθμονόμηση του εργαλείου. Στη συνέχεια, αντισταθμίστε τα σφάλματα μηχανικής κατεργασίας των εργαλείων στις στήλες φθοράς των αντίστοιχων αριθμών μετατόπισης εργαλείου.
Τι αντίκτυπο έχει η επιλογή της σωστής μεθόδου ρύθμισης εργαλείου για τόρνους CNC στην ποιότηταεξαρτήματα κατεργασίας CNC?
Ακρίβεια και ακρίβεια:
Τα εργαλεία κοπής θα είναι σωστά ευθυγραμμισμένα εάν το εργαλείο έχει ρυθμιστεί σωστά. Αυτό επηρεάζει άμεσα την ακρίβεια και την ακρίβεια στις εργασίες μηχανικής κατεργασίας. Η λανθασμένη ρύθμιση του εργαλείου μπορεί να οδηγήσει σε σφάλματα διαστάσεων, κακά φινιρίσματα επιφανειών και ακόμη και θραύσματα.
Συνοχή:
Οι σταθερές ρυθμίσεις εργαλείου διασφαλίζουν ομοιομορφία των εργασιών μηχανικής κατεργασίας και σταθερή ποιότητα σε πολλά μέρη. Μειώνει τις διακυμάνσεις στο φινίρισμα και τις διαστάσεις της επιφάνειας και συμβάλλει στη διατήρηση σφιχτών ανοχών.
Tool Life και Toolwear:
Διασφαλίζοντας ότι το εργαλείο είναι σωστά συνδεδεμένο με το τεμάχιο εργασίας, μια σωστή ρύθμιση εργαλείου μπορεί να μεγιστοποιήσει τη διάρκεια ζωής του εργαλείου. Οι ακατάλληλες ρυθμίσεις του εργαλείου μπορεί να οδηγήσουν σε υπερβολική φθορά και σπάσιμο των εργαλείων, γεγονός που θα μειώσει τη διάρκεια ζωής του εργαλείου.
Παραγωγικότητα και Αποδοτικότητα
Οι αποτελεσματικές τεχνικές ρύθμισης εργαλείων μπορούν να μειώσουν τον χρόνο εγκατάστασης του μηχανήματος και να αυξήσουν το χρόνο λειτουργίας. Αυξάνει την παραγωγικότητα ελαχιστοποιώντας τους χρόνους αδράνειας και μεγιστοποιώντας το χρόνο κοπής. Αυτό επιτρέπει ταχύτερες αλλαγές εργαλείων και μειώνει τους συνολικούς χρόνους κατεργασίας.
Ασφάλεια χειριστή
Η ασφάλεια του χειριστή μπορεί να επηρεαστεί επιλέγοντας τη σωστή μέθοδο ρύθμισης του εργαλείου. Ορισμένες μέθοδοι όπως η αναγνώριση εικόνας ή η μέτρηση εργαλείων λέιζερ εξαλείφουν την ανάγκη χειροκίνητου χειρισμού των εργαλείων, μειώνοντας την πιθανότητα τραυματισμού.
Στόχος της Anebon είναι να κατανοήσει την εξαιρετική παραμόρφωση από την κατασκευή και να παράσχει την κορυφαία υποστήριξη σε εγχώριους και εξωτερικούς πελάτες ολόψυχα για το 2022 υψηλής ποιότητας αλουμίνιο υψηλής ακρίβειας από ανοξείδωτο χάλυβα Προσαρμοσμένης κατασκευήςΤόρνευση CNC, άλεσμα,ανταλλακτικά cncγια την Αεροδιαστημική, Προκειμένου να επεκτείνει τη διεθνή μας αγορά, η Anebon προμηθεύει κυρίως τους υπερπόντιους πελάτες μας μηχανικά εξαρτήματα κορυφαίας ποιότητας, φρεζαρισμένα εξαρτήματα και υπηρεσία τόρνευσης cnc.
Χονδρικό εμπόριο China Machinery Parts and CNC Machining Service, Anebon υποστηρίζει το πνεύμα «καινοτομίας, αρμονίας, ομαδικής εργασίας και κοινής χρήσης, μονοπατιών, ρεαλιστικής προόδου». Δώστε μας μια ευκαιρία και θα πάμε να αποδείξουμε τις δυνατότητές μας. Με την ευγενική σας βοήθεια, η Anebon πιστεύει ότι μπορούμε να δημιουργήσουμε ένα λαμπρό μέλλον μαζί σας.
Ώρα δημοσίευσης: Οκτ-19-2023