
צי איר וויסן ווי פילע מעטהאָדס עס זענען פֿאַר גענוי געצייַג באַשטעטיקן אויף CNC ליידז?
ריר פּראָבע אופֿן: - דער אופֿן ניצט אַ זאָנד וואָס רירט די געצייַג צו מעסטן זייַן שטעלע קאָרעוו צו די מאַשין רעפֿערענץ פונט. עס גיט פּינטלעך דאַטן אויף געצייַג דיאַמעטער און לענג.
מכשירים פאַר-סעטטער:א געצייַג-פאַר-סעטטער ייַנאָרדענונג איז געניצט צו מעסטן די דימענשאַנז פון די געצייַג אַרויס די מאַשין. דעם אופֿן אַלאַוז שנעל און פּינטלעך סעטאַפּ פון די געצייַג.
מכשיר אָפסעט אופֿן:- אין דעם אופֿן, אַן אָפּעראַטאָר מעסטן די לענג און דיאַמעטער פון די געצייַג מיט מכשירים אַזאַ ווי קאַליפּערס און מיקראָמעטערס. די וואַלועס זענען דעמאָלט אריין אין די מאַשין ס קאָנטראָל סיסטעם.
לייזער מכשירים מעזשערמאַנט:לייזער סיסטעמען זענען געניצט צו שטעלן און מעסטן דימענשאַנז פון די מכשירים. דורך פּראַדזשעקטינג אַ שטראַל פון לאַזער ליכט אַנטו די קאַטינג ברעג פון די געצייַג, זיי צושטעלן פּינטלעך און שנעל געצייַג דאַטן.
בילד דערקענונג מעטאָד:אַוואַנסירטע קאָמפּיוטער סיסטעמען קענען נוצן בילד דערקענונג טעכנאָלאָגיע צו אויטאָמאַטיש רעכענען דימענשאַנז פון די מכשירים. זיי טאָן דאָס דורך נעמען בילדער פון די געצייַג, אַנאַלייזינג די פֿעיִקייטן און דערנאָך קאַלקיאַלייטינג די מעזשערמאַנץ.
דאָס איז אַ זייער נוציק אַרטיקל. דער אַרטיקל ינטראַדוסיז ערשטער די פּרינסאַפּאַלז און יידיאַז הינטער די "פּראָצעס-קאַטינג געצייַג-באַשטעטיקן אופֿן" וואָס איז קאַמאַנלי געניצט מיט CNC ליידז. דערנאָך, עס ינטראַדוסיז פיר מאַנואַל מעטהאָדס פון פּראָצעס קאַטינג געצייַג סעטטינגס פֿאַר CNC טורנינג סיסטעמען. צו פֿאַרבעסערן די אַקיעראַסי פון די מכשירים סעטטינגס, אַ פּראָגראַם קאַנטראָולד אָטאַמאַטיק פּראָצעס קאַטינג אופֿן באזירט אויף "אָטאַמאַטיק קאַטינג - מעסטן - טעות קאַמפּאַנסייטינג". פיר פּינטלעך מיטל באַשטעטיקן מעטהאָדס זענען אויך סאַמערייזד.
1. דער פּרינציפּ און יידיאַז הינטער די געצייַג-באַשטעטיקן אופֿן פֿאַר קנק ליידז
פארשטאנד פון די פּרינסאַפּאַלז פון CNC לייד געצייַג-באַשטעטיקן איז וויכטיק פֿאַר אָפּערייטערז וואָס ווילן צו האַלטן קלאָר געדאנקען וועגן געצייַג באַשטעטיקן, בעל געצייַג באַשטעטיקן אַפּעריישאַנז און פֿאָרשלאָגן נייַע מעטהאָדס. געצייַג באַשטעטיקן איז דיטערמאַנינג די אָנהייב שטעלע פון די וואָרקפּיעסע קאָואָרדאַנאַץ סיסטעם, וואָס ענדערונגען ווען פּראָגראַממינג די מאַשין געצייַג קאָואָרדאַנאַץ סיסטעם. געצייַג באַשטעטיקן ינוואַלווז באקומען די מאַשין קאָואָרדאַנאַץ פֿאַר די סטאַרטינג פונט פון אַ רעפֿערענץ געצייַג פּראָגראַם, און דיטערמאַנינג די געצייַג פאָטאָ קאָרעוו צו דעם געצייַג.
די פאלגענדע קאַנווענשאַנז זענען געניצט צו באַווייַזן די קאַנסעפּס און יידיאַז הינטער די געצייַג באַשטעטיקן מיט די פּראָצעס קאַטינג אופֿן. ניצן די Hua Medieval Star Teaching Turning System (ווערסיע נומער 5.30 פון די אַפּלאַקיישאַן ווייכווארג); ניצן די צענטער פון די רעכט זייַט אויף די וואָרקפּיעסע פֿאַר די פּראָגראַם אָנהייב און שטעלן עס מיט די G92 באַפֿעל. דיאַמעטער פּראָגראַממינג, וואָרקפּיעסע קאָואָרדאַנאַץ פון די פּראָגראַם אָנהייב פונט ה זענען (100,50); ינסטאַלירן פיר מכשירים אויף די געצייַג האָלדער. די געצייַג נומ 1 איז אַ 90דעג פּראָסט טורנינג געצייַג און די נומ רעפערענץ געצייַג 2 איז אַ 90דעג אַרויס קרייַז פייַן טורנינג געצייַג. מעסער, ניין ניין. די 4 מעסער איז אַ טרייאַנגגיאַלער טרעדיד מעסער מיט אַ 60 דיגריז ווינקל (די ביישפילן אין דעם אַרטיקל זענען אַלע די זעלבע).
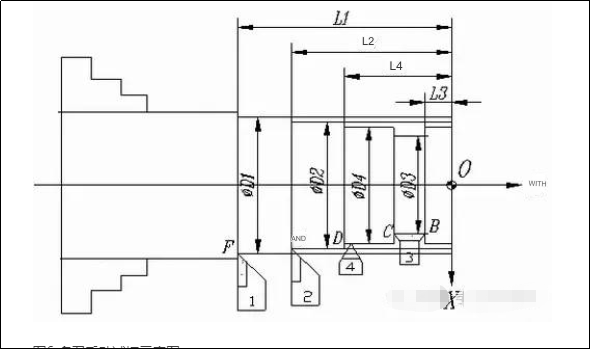
די "מאַשין געצייַג" קאָואָרדאַנאַץ זענען געניצט פֿאַר די געצייַג באַשטעטיקן. ווי געוויזן אין פיגור 1, די רעפֿערענץ געצייַג "מאַניואַלי פּרובירן שנייַדן די ויסווייניקסט קרייַז און די סוף פּנים פון וואָרקפּיעסע און רעקאָרדירן די XZ מאַשין געצייַג קאָואָרדאַנאַץ אויף די אַרויסווייַזן. די מאַשין געצייַג קאָואָרדאַנאַץ פֿאַר די פּראָגראַם אָנהייב אָ זענען דערייווד פון די שייכות צווישן מאַשין געצייַג קאָואָרדאַנאַץ אין פונט א און אָ: XO = XA - Phd, ZO = ZA. ניצן די וואָרקפּיעסע קאָואָרדאַנאַץ פֿאַר H אין באַציונג צו פונט אָ (100,50), מיר קענען לעסאָף אַרויספירן די מאַשין געצייַג קאָואָרדאַנאַץ פֿאַר פונט ה: XH=100 - Phd, ZH=ZA+50. דעם וואָרקפּיעסע קאָואָרדאַנאַט סיסטעם איז באזירט אויף די שטעלע פון די געצייַג שפּיץ אויף די רעפֿערענץ געצייַג.
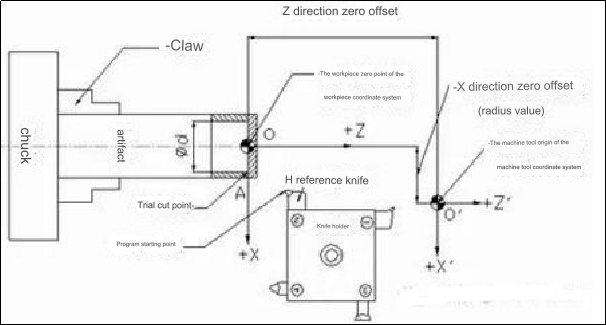
פיגורע 1 סכעמאַטיש דיאַגראַמע פֿאַר מאַנואַל פּראָצעס קאַטינג און מכשירים סעטטינגס
אין פיגורע 2, די פאָטאָ צווישן די פונט א און די געצייַג שפּיץ ב אַקערז רעכט צו די דיפעראַנסיז אין יקסטענשאַנז און שטעלעס אין די X- און ז ריכטונג פון די מכשירים קלאַמפּט אין די געצייַג האָלדער. דער אָריגינעל קאָואָרדאַנאַט סיסטעם פֿאַר די וואָרקפּיעסע איז ניט מער גילטיק. יעדער געצייַג וועט אויך טראָגן אין אַ אַנדערש קורס בעשאַס נוצן. דעריבער, די געצייַג אָפסעץ און טראָגן וואַלועס פֿאַר יעדער געצייַג מוזן זיין קאַמפּאַנסייטאַד.
צו באַשטימען דעם געצייַג פאָטאָ, יעדער געצייַג מוזן זיין אַליינד צו אַ ספּעציפיש רעפֿערענץ פונט (פונט א אָדער ב אין פיגורע 1) אויף די וואָרקפּיעסע. די CRT דיספּלייז מאַשין געצייַג קאָואָרדאַנאַץ וואָס זענען אַנדערש פון די מכשירים אָפסעץ פון די ניט-רעפֿערענץ מכשירים. דעריבער, זיי זענען פּאַזישאַנד אין דער זעלביקער פונט. ניצן מאַנואַל חשבונות אָדער ווייכווארג חשבונות, די קאָואָרדאַנאַץ פון די מאַשין געצייַג זענען סאַבטראַקטיד פון די רעפֿערענץ געצייַג. די געצייַג פאָטאָ איז דעמאָלט קאַלקיאַלייטיד פֿאַר יעדער ניט-נאָרמאַל מיטל.
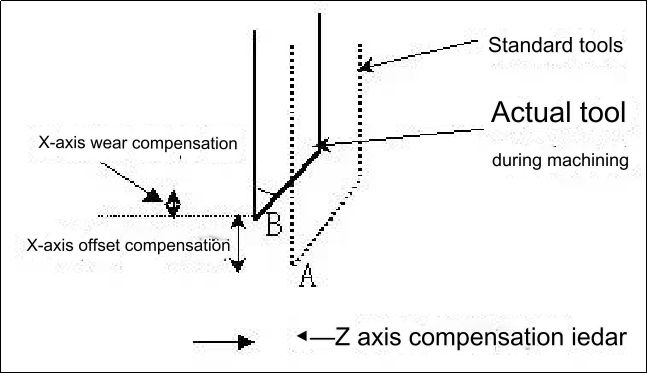
פיגורע 2 פאַרגיטיקונג פֿאַר געצייַג פאָטאָ און טראָגן
די אַקיעראַסי פון מאַנואַל פּראָצעס קאַטינג געצייַג סעטטינגס איז לימיטעד. דאָס איז באקאנט ווי פּראָסט מכשירים. ווי געוויזן אין פיגורע 3, צו דערגרייכן מער פּינטלעך רעזולטאַטן אין די מאַשינינג אַלאַואַנסיז פון דיcnc אַוטאָ טייל, אַ פּשוט אָטאַמייטיד פּראָצעס קאַטינג פּראָגראַם קענען זיין דיזיינד. דער רעפֿערענץ מעסער איז קאַנטיניואַסלי מאַדאַפייד מיט דער באַגריף פון "אָטאַמאַטיק קאַטינג-מעסטן-טעות פאַרגיטיקונג". די געצייַג פאָטאָ און פּראָגראַם סטאַרטינג פונט פון די ניט רעפֿערענץ געצייַג זענען געניצט צו מאַכן זיכער אַז די חילוק צווישן די ווערט פון די פּראַסעסינג לימעד און די פאַקטיש געמאסטן ווערט טרעפן די אַקיעראַסי רעקווירעמענץ. פּרעסיסיאָן געצייַג באַשטעטיקן איז די געצייַג באַשטעטיקן וואָס אַקערז אין דעם בינע.
עס איז פּראָסט צו פאַרריכטן די ניט-נאָרמאַל אָפסעץ נאָך די ערשט קערעקשאַן. דאָס איז ווייַל עס איז אַ פּרירעקוואַזאַט פֿאַר פּינטלעך אָפסעץ פון די רעפֿערענץ געצייַג צו ענשור אַז די סטאַרטינג פונט פון די רעפֿערענץ געצייַג איז פּינטלעך.
דעם יקערדיק געצייַג באַשטעטיקן פּראָצעס איז אַטשיווד דורך קאַמביינינג די צוויי סטאַגעס: מאַניואַלי פּרובירן שנייַדן די מעסער מיט די רעפֿערענץ צו באַקומען מאַשין געצייַג קאָואָרדאַנאַץ פֿאַר די געצייַג באַשטעטיקן רעפֿערענץ. - רעכענען אָדער אויטאָמאַטיש רעכענען די אָפסעץ פון יעדער ניט-רעפֿערענץ געצייַג. - דער רעפֿערענץ מעסער איז ליגן אין די דערנענטערנ אָנהייב פון די פּראָגראַם. - דער רעפֿערענץ מעסער ריפּיטידלי רופט אַרויף די פּרובירן קאַטינג פּראָגראַם. די געצייַג האָלדער וועט זיין אריבערגעפארן אין MDI אָדער שריט מאָדע צו פאַרגיטיקן פֿאַר ערראָרס און ריכטיק די שטעלע פון די סטאַרטינג פונט. נאָך מעסטן די גרייס, די ניט-באַזע מעסער ריפּיטידלי רופן די פּרובירן-קאַטינג פּראָגראַם. די געצייַג פאָטאָ איז קערעקטאַד באזירט אויף דעם פאָטאָ. דעם מיטל אַז די רעפֿערענץ געצייַג וועט זיין סטיישאַנערי אין די פּינטלעך אָנהייב פון די פּראָגראַם.
פיגורע 3 סכעמאַטיש דיאַגראַמע פון געצייַג באַשטעטיקן פֿאַר Multi-Knife Trial Cutting
איבערבליק פון פּראָסט מעסער באַשטעטיקן טעקניקס
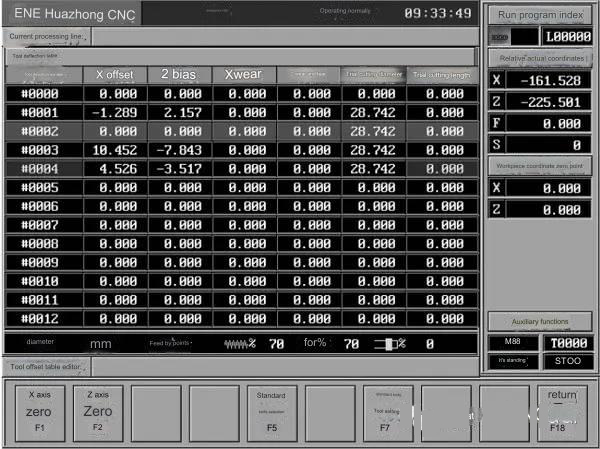
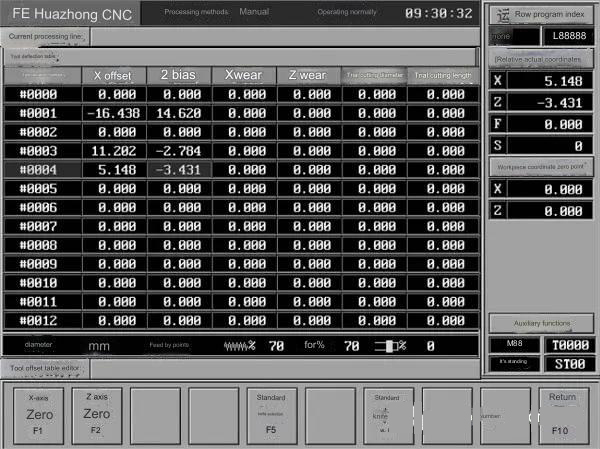
צו גרייטן זיך פֿאַר די סעטאַפּ פון די מכשירים, איר קענען נוצן קיין פון די פאלגענדע מעטהאָדס: דריקן די F2 שליסל אין די סובמענו פון סיסטעם MDI צו אַקסעס די געצייַג פאָטאָ טיש. ניצן די שליסלען צו מאַך די הויכפּונקט באַר צו די געצייַג נומער שטעלע וואָס קאָראַספּאַנדז צו יעדער געצייַג און דריקן די F5 קנעפּל. מאָדיפיצירן די X און Z פאָטאָ וואַלועס פון מכשירים פאָטאָ נומערן #0000 און #0001, און דריקן די שליסל F5.
1) אָטאַמאַטיק שטעלן די געצייַג פאָטאָ אופֿן דורך סאַלעקטינג די רעפֿערענץ געצייַג.
די סטעפּס פֿאַר באַשטעטיקן די געצייַג זענען געוויזן אין Figures 1 און 4.
די בלוי באַר כיילייטיד מיט די שליסלען קענען זיין אריבערגעפארן צו ייַנרייען די געצייַג פאָטאָ #0002 פֿאַר די נומער 2 רעפֿערענץ געצייַג. רעפערענץ געצייַג 2. צו שטעלן די No.2, דריקן די F5 שליסל. די 2 געצייַג וועט זיין באַשטימט ווי די פעליקייַט געצייַג.
2) שנייַדן די ויסווייניקסט קרייַז מיט די רעפֿערענץ געצייַג און טאָן די X מאַשין-געצייג קאָואָרדאַנאַץ. נאָך ריטראַקטינג די געצייַג, האַלטן די מאַשין און מעסטן די ויסווייניקסט דיאַמעטער פון די שטיל אָפּשניט.
3) די רעפֿערענץ בלייד קערט צו די פונט א רעקאָרדעד דורך די "דזשאַג + שריט" אופֿן. אַרייַנשרייַב PhD און נול אין די שפאלטן פֿאַר די קאַטינג דיאַמעטער פון די פּראָבע און די קאַטינג לענג פון די פּראָבע ריספּעקטיוולי.
4) צוריקציען די נאָרמאַל געצייַג און סעלעקטירן דעם נומער פון די ניט-סטאַנדאַרד געצייַג. דערנאָך טוישן די געצייַג מאַניואַלי. די געצייַג שפּיץ פֿאַר יעדער ניט-נאָרמאַל מכשירים זאָל זיין אַליינד וויזשוואַלי מיט פונט א ניצן די "דזשאַג + שריט" אופֿן. סטרויערן די קאָראַספּאַנדינג פאָטאָ נאָך די געצייַג איז וויזשוואַלי אַליינד. אויב איר אַרייַן נול און PhD אין די שפאלטן פֿאַר דער פּראָצעס קאַטינג לענג און דיאַמעטער, די מעסער אָפסעץ פון אַלע ניט-רעפֿערענץ נייווז וועט אויטאָמאַטיש זיין געוויזן אין די X פאָטאָ און Z פאָטאָ זייַל.
5) אַמאָל די רעפֿערענץ געצייַג איז אומגעקערט צו פונט א, MDI וועט לויפן "G91 G00 / אָדער" G01 X[100 PhD] Z50 צו באַקומען צו די סטאַרטינג פונט פון די פּראָגראַם.
פיגורע 4 סכעמאַטיש דיאַגראַמע פון די רעפֿערענץ געצייַג אויטאָמאַטיש באַשטעטיקן די געצייַג פאָטאָ פֿאַר די נאָרמאַל געצייַג
2. שטעלן די קאָואָרדאַנאַץ פון די רעפֿערענץ געצייַג צו נול אין די געצייַג באַשטעטיקן רעפֿערענץ פונט און אויטאָמאַטיש אַרויסווייַזן די געצייַג פאָטאָ אופֿן
ווי געוויזן אין פיגורע 1 און פיגורע 5, די געצייַג באַשטעטיקן סטעפּס זענען ווי גייט:
1) זעלביקער ווי שריט (2) אויבן.
2) די רעפֿערענץ מעסער קערט צו דער פּראָצעס קאַטינג פונט א דורך די "דזשאַג + שריט" אופֿן לויט די רעקאָרדעד ווערט.
3) אין די צובינד געוויזן אין פיגורע 4, דריקן די F1 שליסל צו "שטעלן די X-אַקס צו נול" און דריקן די F2 שליסל צו "שטעלן די ז-אַקס צו נול". דערנאָך די "רעלאַטיוו פאַקטיש קאָואָרדאַנאַץ" געוויזן דורך די קרט זענען (0, 0).
4) מאַניואַלי טוישן די ניט-רעפֿערענץ געצייַג אַזוי אַז זייַן געצייַג שפּיץ איז וויזשוואַלי אַליינד מיט פונט א. אין דעם צייַט, די ווערט פון "רעלאַטיוו פאַקטיש קאָואָרדאַנאַץ" געוויזן אויף די CRT איז די געצייַג פאָטאָ פון די געצייַג קאָרעוו צו די רעפֿערענץ געצייַג. ניצן די ▲ און קיז צו מאַך די בלוי הויכפּונקט די געצייַג פאָטאָ נומער פון די ניט-רעפֿערענץ געצייַג, רעקאָרד עס און אַרייַן עס אין די קאָראַספּאַנדינג שטעלע.
5) זעלביקער ווי די פריערדיקע שריט (5).
פיגורע 5 סכעמאַטיש דיאַגראַמע פון די געצייַג אָפסעט אויטאָמאַטיש געוויזן ווען די רעפערענץ טול איז באַשטימט צו נול אין די קאָואָרדאַנאַץ פון די רעפֿערענץ פונט פון די געצייַג באַשטעטיקן.
3. די מעסער פאָטאָ אופֿן איז קאַלקיאַלייטיד דורך מאַניואַלי קאַלקיאַלייטינג די פּראָצעס קאַטינג מיט קייפל נייווז פון די ויסווייניקסט קייַלעכיק שטיל אָפּשניט.
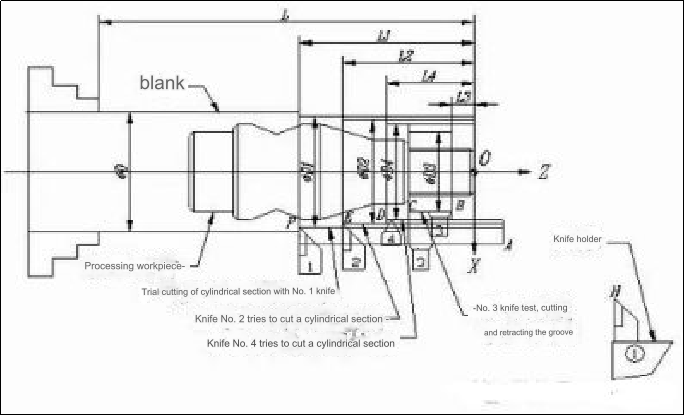
ווי געוויזן אין פיגור 6, די סיסטעם מאַניואַלי אַליינז נייווז 1, 2 און 4 און שנייַדן אויס אַן אַקס. עס דעמאָלט רעקאָרדס די מאַשין קאָואָרדאַנאַץ פֿאַר די קאַטינג ענדס פון יעדער מעסער. (פּוינט F, D, און E אין פיגור 6). מעסטן די דיאַמעטער און לענג פֿאַר יעדער אָפּשניט. פאַרבייַטן די נומ 1 קאַטינג מעסער. ווי געוויזן אין די בילד, שנייַדן אַ געצייַג נישע. ייַנרייען די קאַטינג בלייד מיט די רעכט שפּיץ, רעקאָרדירן די קאָואָרדאַנאַץ פֿאַר פונט ב און מעסטן L3 און PhD3 לויט די פיגור. די ינקראַמענטאַל קאָואָרדאַנאַט שייכות צווישן F, E און D ווייזט פֿאַר יעדער געצייַג, און די אָ אָנהייב קענען זיין באשלאסן דורך קאַמפּערינג די דאַטן אויבן.
עס קענען זיין געזען אַז מאַשין געצייַג קאָואָרדאַנאַץ זענען (X2-PhD2+100 און Z2-L2+50) און מאַשין געצייַג קאָואָרדאַנאַץ פֿאַר די פּראָגראַם סטאַרטינג פונט קאָראַספּאַנדינג צו די רעפֿערענץ געצייַג. דער מעטאָד פון כעזשבן איז געוויזן אין טיש 1. אין די בלאַנקס, אַרייַן די קאַלקיאַלייטיד און רעקאָרדעד וואַלועס. באַמערקונג: דער פּראָצעס קאַטינג דיסטאַנסע איז די ווייַטקייט צווישן די קאָואָרדאַנאַט נול פונט פון די וואָרקפּיעסע און די סוף פונט פון די פּראָצעס שנייַדן אין די ז-ריכטונג. positive און נעגאַטיוו אינסטרוקציעס זענען באשלאסן דורך די קאָואָרדאַנאַט אַקס.
פיגורע 6 סכעמאַטיש דיאַגראַמע פון מאַנואַל פּראָצעס קאַטינג מיט מאַלטי-מעסער
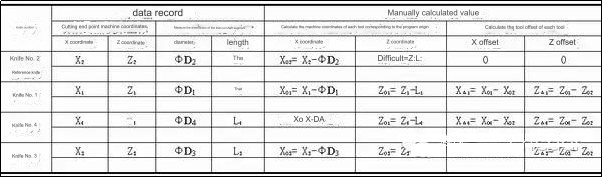
טיש 1 קאַלקולאַטיאָן פון געצייַג אָפסעץ פֿאַר ניט-נאָרמאַל מכשירים
דעם אופֿן אַלאַוז פֿאַר אַ פּשוט פּרובירן קאַטינג פּראָצעדור, ווי עס ילימאַנייץ די נויט צו וויזשוואַלי ייַנרייען די פּרובירן קאַטינג פונקטן. אָבער, די מעסער פאָטאָ מוזן זיין קאַלקיאַלייטיד מאַניואַלי. איר קענען געשווינד רעכענען די געצייַג פאָטאָ אויב איר דרוקן די בלאַט מיט די פאָרמולע און דעמאָלט פּלאָמבירן די בלאַנקס.
פיגורע 7 סכעמאַטיש דיאַגראַמע פֿאַר אָטאַמאַטיק געצייַג באַשטעטיקן אויף Century Star CNC סיסטעם
מולטי-געצייג אָטאַמאַטיק געצייַג שטעלן אופֿן פֿאַר 4 יאָרהונדערט שטערן קנק סיסטעם
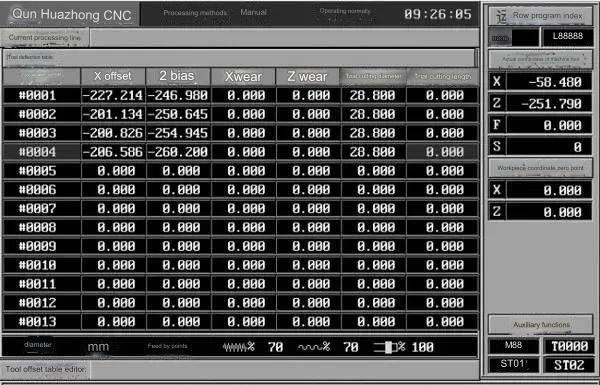
אַלע פון די אויבן דערמאנט מעטהאָדס פֿאַר געצייַג פאָטאָ זענען קאָרעוו מעטהאָדס. נאָך פּראָפעסיאָנאַל שטעקן האָבן דורכגעקאָכט פּאַראַמעטער באַשטעטיקן און סיסטעם טעסטינג, HNC-21T אַלאַוז יוזערז צו סעלעקטירן דעם "אַבסאָלוט פאָטאָ מעטאָד" ווען באַשטעטיקן מכשירים. אין מאַשינינג פּראָגראַממינג, די אַבסאָלוט געצייַג פאָטאָ איז אַ ביסל אַנדערש ווי די קאָרעוו געצייַג אַוועק אופֿן. עס איז ניט נייטיק צו נוצן G92 אָדער G54 פֿאַר די וואָרקפּיעסע קאָואָרדאַנאַט סיסטעמען, און עס איז ניט נייטיק צו באָטל מאַכן די פאַרגיטיקונג פון די מכשירים. זען פּראָגראַם O1005 פֿאַר אַ בייַשפּיל. ווי געוויזן אין פיגורע 6, נאָך די סיסטעם קערט צוריק צו נול, לאָזן יעדער מעסער פּרובירן מאַניואַלי צו שנייַדן אַ צילינדער אָפּטיילונג.
נאָך מעסטן די לענג און דיאַמעטער, פּלאָמבירן די נומער פון מכשירים פֿאַר יעדער מעסער. דער פּראָצעס קאַטינג לענג איז ליסטעד אין די זייַל פֿאַר פּראָצעס קאַטינג דיאַמעטער. די סיסטעם ווייכווארג, ניצן דעם אופֿן דיסקרייבד אין "מולטיקניפע קאַטינג פון פונדרויסנדיק שטיל אָפּשניט - מאַנואַל קאַלקולאַטיאָן פֿאַר מעסער אָפסעט", קענען אויטאָמאַטיש רעכענען די מאַשין געצייַג קאָואָרדאַנאַץ פֿאַר יעדער מעסער לויט די אָנהייב פון די פּראָגראַם. דער אופֿן פון באַשטעטיקן מכשירים איז די פאַסטאַסט, און עס איז דער הויפּט פּאַסיק פֿאַר ינדאַסטרי פּראָדוקציע.
קיצער פון פינף פּינטלעך געצייַג באַשטעטיקן טעקניקס
דער פּרינציפּ פון גענוי געצייַג באַשטעטיקן איז "אָטאַמאַטיק מעזשערמאַנט, אָטאַמאַטיק פּראָצעס קאַטינג און טעות פאַרגיטיקונג". דער טעות פאַרגיטיקונג קענען זיין צעטיילט אין צוויי קאַטעגאָריעס: פֿאַר דער רעפֿערענץ געצייַג MDI אָפּעראַציע, אָדער שריט מאָווינג געצייַג הודעות צו פאַרגיטיקן זייַן פּראָגראַם סטאַרטינג שטעלע; און פֿאַר ניט-נאָרמאַל געצייַג צו פאַרגיטיקן זייַן געצייַג פאָטאָ אָדער טראָגן וואַלועס. צו ויסמיידן צעמישונג, טיש 2 איז דיזיינד צו רעכענען און רעקאָרדירן וואַלועס.
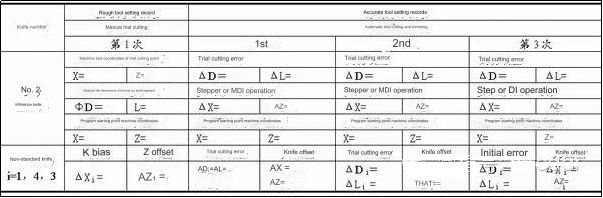
טיש 2 מכשיר באַשטעטיקן רעקאָרד טיש פֿאַר פּראָצעס קאַטינג מעטאַד (Unit: מם
1. מאָדיפיצירן די פאָטאָ אופֿן פֿאַר יעדער ניט-נאָרמאַל געצייַג נאָך די רעפֿערענץ געצייַג קערעקטאַד די סטאַרטינג פונט.
די סטעפּס פֿאַר באַשטעטיקן די געצייַג זענען געוויזן אין פיגורע 3.
נאָך פּראָסט געצייַג קאַלאַבריישאַן, די רעפֿערענץ געצייַג זאָל זיין אין די אָנהייב פון די פּראָגראַם. אַרייַן די פאָטאָ פון יעדער ניט-נאָרמאַל געצייַג אין די צונעמען שטעלע פון די טיש.
ניצן די O1000 פּראָגראַם צו פּראָצעס PhD2xL2 אין סדר צו מאַכן אַ פּראָצעס שנייַדן.
דערנאָך, מעסטן די דיאַמעטער און די לענג פון די סעגמענטעד קאַטינג שטיל, פאַרגלייַכן זיי מיט די ווערט אין די באַפֿעל פּראָגראַם און באַשטימען דעם טעות.
מאָדיפיצירן די אָנהייב פונט פון די פּראָגראַם אויב די MDI טעות ווערט אָדער שריט באַוועגונג איז גרעסער ווי די MDI טעות ווערט.
5) מאָדיפיצירן די O1000 באַפֿעלן ווערט דינאַמיקאַללי באזירט אויף די געמאסטן דימענשאַנז און ראַטעווען די פּראָגראַם. איבערחזרן די סטעפּס (2) ביז די סטאַרטינג שטעלע פון די רעפֿערענץ געצייַג איז אין די אַקיעראַסי קייט. באַמערקונג די מאַשין-געצייג קאָואָרדאַנאַץ פֿאַר די קערעקטאַד פּראָגראַם ס סטאַרטינג פונט. שטעלן די קאָואָרדאַנאַץ אויף נול.
6) רעדל די אָ1001 (מעסער נומ 1, נומ אָ1002 (מעסער נומ 3) פֿאַר יעדער פּראָצעס שנייַדן, און מעסטן די לענג לי (איך = 1, 2, 3) און דיאַמעטער PhDi פון יעדער אָפּטיילונג.
7) פאַרגיטיקן פֿאַר ערראָרס ניצן די טיש 3 אופֿן.
איבערחזרן סטעפּס 6 צו 7 ביז די מאַשינינג ערראָרס זענען אין די קייט פון אַקיעראַסי און די רעפֿערענץ געצייַג איז סטאַפּט אין די אָנהייב פונט פון די פּראָגראַם און טוט נישט רירן.
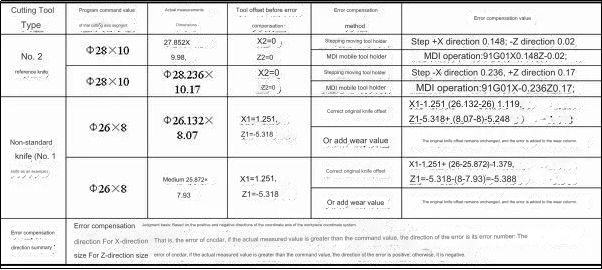
טיש 3 בייַשפּיל פון טעות פאַרגיטיקונג פֿאַר אָטאַמאַטיק פּראָצעס קאַטינג פון סילינדריקאַל שטיל סעגמאַנץ (אַפּאַראַט: מם).
2. מאָדיפיצירן די סטאַרטינג שטעלע פון יעדער געצייַג ינדיווידזשואַלי
דער פּרינציפּ פון דעם מיטל באַשטעטיקן איז אַז יעדער געצייַג אַדזשאַסטיד זייַן סטאַרטינג פּראָגראַם פונט, אַזוי מינאַצאַד אַליינינג מיט דער זעלביקער אָנהייב שטעלע.
די סטעפּס פֿאַר באַשטעטיקן די געצייַג זענען געוויזן אין פיגורע 3.
נאָך פּראָסט געצייַג קאַלאַבריישאַן, די נומ נאָך פּראָסט געצייַג קאַלאַבריישאַן און רעקאָרדינג די אָפסעץ, די נומער 2 רעפֿערענץ געצייַג זאָל זיין אין די אָנהייב פון די פּראָגראַם.
די סטעפּס 2) צו (5) פון דער ערשטער פּינטלעך מיטל-באַשטעטיקן אופֿן זענען יידעניקאַל.
ניצן די O1000 פּראָגראַם צו דורכפירן אַ פּראָצעס שנייַדן. מעסטן די לענג לי און דיאַמעטער PhDi פון יעדער אָפּטיילונג.
די שריט באַוועגונג געצייַג אָדער MDI געצייַג האָלדער קאַמפּאַנסייץ פֿאַר ערראָרס און אַדזשאַסטיד די סטאַרטינג פונט פון יעדער געצייַג פּראָגראַם.
איבערחזרן די סטעפּס (6) ביז די סטאַרטינג שטעלע פֿאַר יעדער ניט-נאָרמאַל פּראָגראַם געצייַג איז ין דער געראָטן אַקיעראַסי.
די געצייַג פאָטאָ טיש קענען זיין אַקסעסט דורך אַרייַן די קאָרעוו קאָואָרדאַנאַץ געוויזן אויף די CRT אין די X פאָטאָ און Z פאָטאָ זייַל קאָראַספּאַנדינג צו די נומער פון די געצייַג פאָטאָ. דעם אופֿן איז באַקוועם און פּשוט. דעם אופֿן איז פּשוט און באַקוועם.
3. מאָדיפיצירן אַלע פאָטאָ מעטהאָדס פֿאַר ניט-נאָרמאַל מכשירים אין דער זעלביקער מאָמענט נאָך מאַדאַפייינג די אָנהייב שטעלע פון די געצייַג רעפֿערענץ פּראָגראַם.
דער אופֿן איז די זעלבע ווי דער ערשטער פּינטלעך מיטל-באַשטעטיקן אופֿן. דער איינציקער אונטערשייד צווישן די צוויי איז אז אין סטעפ 7 ווערט אנגערופן די O1003 פראגראם, וואס רופט סיימאל דריי מעסערס (O1004 רימוווז נומ. די O1003 פראגראם ריפּלייסט די נומער 2 אָפּטיילונג פון געצייג פּראַסעסינג. די איבעריקע סטעפּס זענען יידעניקאַל.
6. פיר נייווז קענען זיין ריפּערד אין אַמאָל מיט דעם אופֿן
צו געפֿינען די מאַשינינג טעות, מעסטן די דיאַמעטער פון יעדער אָפּטיילונג, PhDi, און די לענג פון יעדער אָפּטיילונג, Li (i = 2, 1, 4), ניצן די קאָרעוו געצייַג-אָפסעט אופֿן. ניצן MDI אָדער סטעפּוויסע באַוועגונג צו די געצייַג האָלדער פֿאַר די רעפֿערענץ געצייַג. מאָדיפיצירן די אָנהייב פונט פון די פּראָגראַם. פֿאַר די ניט-נאָרמאַל מכשירים, ערשטער ריכטיק די פאָטאָ מיט דער אָריגינעל פאָטאָ. דערנאָך אַרייַן די נייַע פאָטאָ. די מאַשינינג טעות פֿאַר די רעפֿערענץ געצייַג מוזן אויך זיין אריין אין די טראָגן זייַל. רופן די O1005 פּראָצעס קאַטינג פּראָגראַם אויב די אַבסאָלוט געצייַג פאָטאָ איז געניצט צו קאַלאַברייט די געצייַג. דערנאָך, פאַרגיטיקן די מאַשינינג ערראָרס פון די מכשירים אין די טראָגן שפאלטן פון זייער ריספּעקטיוו מכשירים פאָטאָ נומערן.
וואָס פּראַל האט טשוזינג די ריכטיק געצייַג באַשטעטיקן אופֿן פֿאַר קנק ליידז אויף די קוואַליטעט פוןקנק מאַשינינג טיילן?
אַקיעראַסי און פּינטלעכקייַט:
די קאַטינג מכשירים וועט זיין רעכט אַליינד אויב די געצייַג איז ריכטיק שטעלן. דעם גלייך ימפּאַקץ די אַקיעראַסי און פּינטלעכקייַט אין מאַשינינג אַפּעריישאַנז. פאַלש געצייַג באַשטעטיקן קענען רעזולטאַט אין דימענשאַנאַל ערראָרס, נעבעך סערפאַסיז פינישעס און אפילו ברעקל.
קאָנסיסטענסי:
קאָנסיסטענט געצייַג סעטטינגס ינשור יונאַפאָרמאַטי פון מאַשינינג אַפּעריישאַנז און קאָנסיסטענט קוואַליטעט אין קייפל פּאַרץ. עס ראַדוסאַז ווערייישאַנז אין ייבערפלאַך ענדיקן און דימענשאַנז, און העלפּס צו האַלטן ענג טאָלעראַנץ.
געצייג לעבן און מכשירים:
דורך ינשורינג אַז די געצייַג איז רעכט פאַרקנאַסט מיט די וואָרקפּיעסע, אַ ריכטיק געצייַג באַשטעטיקן קענען מאַקסאַמייז די געצייַג לעבן. ימפּראַפּער געצייַג סעטטינגס קענען רעזולטאַט אין יבעריק טראָגן און ברייקידזש פון מכשירים, וואָס וועט רעדוצירן די לעבן פון די געצייַג.
פּראָדוקטיוויטי און עפעקטיווקייַט
עפעקטיוו געצייַג באַשטעטיקן טעקניקס קענען רעדוצירן מאַשין סעטאַפּ צייט און פאַרגרעסערן ופּטימע. עס ינקריסאַז פּראָודאַקטיוויטי דורך מינאַמייזינג ליידיק צייט און מאַקסאַמייזינג קאַטינג צייט. דאָס אַלאַוז קוויקער ענדערונגען אין די מכשירים און ראַדוסאַז קוילעלדיק מאַשינינג צייט.
אָפּעראַטאָר סאַפעטי
די זיכערקייַט פון דער אָפּעראַטאָר קענען זיין אַפעקטאַד דורך טשוזינג די ריכטיק מיטל באַשטעטיקן אופֿן. עטלעכע מעטהאָדס ווי בילד דערקענונג אָדער לאַזער געצייַג מעזשערמאַנט עלימינירן די נויט צו שעפּן מכשירים מאַניואַלי, רידוסינג די געלעגנהייַט פון שאָדן.
דער ציל פון Anebon איז צו פֿאַרשטיין ויסגעצייכנט דיספיגורמאַנט פון מאַנופאַקטורינג און צושטעלן די העכסט שטיצן צו דינער און אויסלאנד קלייאַנץ מיט גאנצן כאַרטאַד פֿאַר 2022 הויך קוואַליטעט ומבאַפלעקט שטאָל אַלומינום הויך פּרעסיסיאָן קאַסטאַמייזד.קנק טורנינג, מילינג ,קנק ספּער טיילןפֿאַר אַעראָספּאַסע, אין סדר צו יקספּאַנד אונדזער אינטערנאציאנאלע מאַרק, Anebon דער הויפּט צושטעלן אונדזער מעייווער - לייאַם קאַסטאַמערז העכסט קוואַליטעט פאָרשטעלונג מעטשאַניקאַל פּאַרץ, מילד פּאַרץ און קנק טורנינג דינסט.
טשיינאַ כאָולסייל טשיינאַ מאַשינערי פּאַרץ און קנק מאַשינינג סערוויס, Anebon אַפּכאָולדז די גייסט פון "כידעש, האַרמאָניע, מאַנשאַפֿט אַרבעט און ייַנטיילונג, טריילז, פּראַגמאַטיק פּראָגרעס". געבן אונדז אַ געלעגנהייט און מיר וועלן באַווייַזן אונדזער פיייקייט. מיט דיין ליב הילף, Anebon גלויבן אַז מיר קענען מאַכן אַ העל צוקונפֿט מיט איר צוזאַמען.
פּאָסטן צייט: 19 אקטאבער 2023