
Karbidestiya alavên amûra makîneya CNC ji nêz ve bi rastbûna wê ve girêdayî ye, ku ew ji bo pargîdaniyan gava kirîn an pêşkeftina amûrên weha dike pêşengek bingehîn. Lêbelê, rastbûna pir amûrên makîneya nû bi gelemperî bi derketina ji kargehê ji standardên pêwîst kêm dibe. Digel vê yekê, di dema karanîna dirêj de rûdana mekanîzmayî û kişandina mekanîkî li ser hewcedariya girîng a sererastkirina rastbûna amûrên makîneya CNC-ê ji bo misogerkirina performansa hilberîna çêtirîn tekez dike.
1. Tezmînata paşveçûnê
Kêmkirina BacklashWinthin Amûrên makîneya CNC, xeletiyên ku ji deverên mirî berevajî yên hêmanên ajotinê yên li ser zincîra veguheztina xwarinê ya her eksê koordînat û paqijkirina berevajî ya her cotek veguheztina tevgera mekanîkî rê li ber veqetandinê vedike ji ber ku her axek koordînat ji tevgera pêş ve diçe berevajî. Dema ku pergalên servo yên nîv-girtî têne bikar anîn ev veqetîn, ku wekî paqijiya berevajî an leza winda jî tê zanîn, dikare bi girîngî bandorê li rastbûna pozîsyonê û rastbûna pozîsyona dubare ya amûra makîneyê bike. Digel vê yekê, zêdebûna gav bi gav di paqijkirina cotên kinematîk de ji ber cilê bi demê re dibe sedema zêdebûna berevajî ya berevajî. Ji ber vê yekê, pîvandin û tezmînata birêkûpêk ji bo veguheztina berevajî ya her axê hevrêzî ya amûra makîneyê pêdivî ye.

Pîvana paşvekêşanê
Ji bo nirxandina devjêberdana berevajî, di nav rêza rêwîtiyê ya eksê hevrêzê de dest pê bikin. Pêşîn, xalek referansê bi rêvekirina dûrek destnîşankirî li pêş an jî berevajî ve saz bikin. Li dû vê yekê, fermanek tevgerê ya taybetî di heman rê de derxînin da ku dûrek diyar bikişîne. Dûv re, bidomînin ku heman dûrahiyê berevajî bigerin û cûdahiya di navbera pozîsyonên referans û rawestanê de diyar bikin. Bi gelemperî, pîvandinên pirjimar (bi gelemperî heft) li sê cihan li nêzê xala navîn û her du jîngehên rêza rêwîtiyê têne kirin. Dûv re nirxa navîn li her deverê tête hesibandin, ku herî zêde di nav van navîn de wekî pîvana ji bo veguheztina berevajî tê bikar anîn. Pêdivî ye ku meriv di dema pîvandinê de dûrek taybetî bimeşe da ku bi rast nirxa berevajî veqetandinê were destnîşankirin.

Dema ku guheztina berevajî ya eksê tevgera xêzkirî tê nirxandin, gelemperî ye ku wekî amûrek pîvandinê nîşankerek an pîvanek dialê bikar bînin. Ger rewş destûr bide, ji bo vê mebestê dikare navberek lazer-frekansa dualî jî were bikar anîn. Dema ku ji bo pîvandinê nîşankerek dialê bikar tînin, pêdivî ye ku meriv pê ewle bibe ku bingeh û stûna metreyê zêde dirêj nebin, ji ber ku di dema pîvandinê de kelekek dirêj dikare bibe sedem ku bingeha metre ji ber zorê bilive, û bibe sedema xwendinên nerast û nirxên tezmînatê yên nerast.
Pêkanîna rêbazek bernamekirinê ya ji bo pîvandinê dikare rehetî û rastbûna pêvajoyê zêde bike. Mînakî, ji bo nirxandina guheztina berevajî ya X-ê li ser amûrek makîneya vertîkal a sê-koordînat, pêvajo dikare bi pêlkirina metreyê li ser rûyê silindirîkî ya tîrêjê dest pê bike, li dûv wê jî bernameyek destnîşankirî ji bo pîvandinê dimeşîne.
N10G91G01X50F1000; maseya xebatê ber bi rastê ve bigerînin
N20X-50;maseya xebatê ber bi çepê ve diçe da ku valahiya veguheztinê ji holê rake
N30G04X5; ji bo çavdêriyê raweste
N40Z50; Eksena Z rakir û ji rê derket
N50X-50: Maseya xebatê ber bi çepê ve diçe
N60X50: Workbench rast tevdigere û vedigere
N70Z-50: Eksê Z reset
N80G04X5: Ji bo çavdêriyê raweste
N90M99;
Girîng e ku bala xwe bidinê ku encamên pîvandî dikarin li ser bingeha leza xebitandina cihêreng a kargehê cûda bibin. Bi gelemperî, nirxa pîvandinê di leza nizm de ji ya bi leza bilind mezintir e, nemaze dema ku barkirina eksê amûra makîneyê û berxwedana tevgerê girîng e. Di leza kêmtir de, maseya xebatê bi lezek hêdîtir tevdigere, di encamê de îhtîmala zêdebûn û zêdebûnê kêm dibe, ji ber vê yekê nirxek pîvandî ya bilindtir peyda dike. Ji hêla din ve, di leza bilind de, ji ber leza tabloya xebatê ya zûtir, zêdebûn û rêveçûn pirtir dibe, ku di encamê de nirxek pîvandî ya piçûktir çêdibe. Nêzîkatiya pîvandinê ya ji bo veguheztina berevajî ya teşeya tevgera zivirî pêvajoyek mîna ya eksê xêzikî dişopîne, ku cûdahiya tenê amûra ku ji bo tespîtê tê bikar anîn e.

Tezmînata ji bo Backlash
Gelek amûrên makîneya CNC-ê yên ku li welêt têne çêkirin rastbûna pozîsyonê ji 0.02 mm zêdetir nîşan didin, lê di heman demê de kapasîteya tezmînatê tune. Di hin rewşan de, teknîkên bernamekirinê dikarin werin bikar anîn da ku pozîsyona yekalî pêk bînin û paşvekêşana ji bo amûrên makîneyê yên weha ji holê rakin. Heya ku hêmana mekanîkî neguherî bimîne, destpêkirina pêvajoya navberkirinê pêkan e gava ku pozîsyona kêm-leza, yek-alî digihîje xala destpêkê ya navberdanê. Dema ku di dema xwarina interpolasyonê de bi rêgezek berevajî re rûbirû dibe, bi fermî vegirtina nirxa paqijkirina berevajî potansiyela wê heye ku rastbûna pêvajoya navberkirinê zêde bike û bi bandor bigihîjecnc parçeyek hûrkirîdaxwazên toleransê.
Ji bo cûrbecûr amûrên makîneya CNC-ê, navnîşanên bîranînê yên pirjimar di cîhaza CNC de bi gelemperî têne destnîşan kirin ku nirxa paşîn a her axê hilînin. Gava ku axek amûra makîneyê tê rêve kirin ku rêgeza tevgera xwe biguhezîne, cîhaza CNC dê bixweber nirxa paşverû ya eksê bistîne, ku nirxa fermana jicîhûwarkirina hevrêzê telafî dike û rast dike. Ev piştrast dike ku amûra makîneyê dikare bi rastî li pozîsyona fermanê were bicîh kirin û bandora neyînî ya berevajîkirina berevajîkirina rastbûna amûra makîneyê kêm dike.
Bi gelemperî, pergalên CNC bi nirxek tazmînata paşverû ya yekane ya berdest têne saz kirin. Hevsengkirina rastbûna tevgerê ya bi leza bilind û nizm, û hem jî çareserkirina çêtirbûna mekanîkî, dijwar dibe. Digel vê yekê, nirxa veguheztina berevajî ya ku di dema tevgera bilez de tê pîvandin tenê dikare wekî nirxa tezmînata têketinê were bikar anîn. Ji ber vê yekê, gihîştina hevsengiya di navbera rastbûna pozîsyona bilez û rastbûna navberê de di dema qutkirinê de dijwar e.

Ji bo pergalên CNC yên wekî FANUC0i û FANUC18i, ji bo tevgera bilez (G00) û tevgera qutkirina bi leza hêdî (G01) du awayên berdêla paşverûyê hene. Bi rêbaza xwarina bijartî ve girêdayî, pergala CNC bixweber nirxên berdêlê yên cihêreng hildibijêre û bikar tîne da ku bigihîje rastbûna pêvajoyê ya pêşkeftî.
Nirxa paşverû A, ku ji tevgera xwarina birrîna G01 hatî wergirtin, divê têkeve nav parametreya NO11851 (leza ceribandina G01 divê li ser bingeha leza xwarina birrîna ku bi gelemperî tê bikar anîn û taybetmendiyên amûra makîneyê were destnîşankirin), dema ku nirxa paşverû B ji G00 were danîn. nav parametreya NO11852. Girîng e ku were zanîn ku ger pergala CNC hewl dide ku tazmînata paşverû ya berevajî ya ku ji hev veqetandî hatî destnîşan kirin bicîh bîne, divê jimareya çaremîn (RBK) ya parametreya jimare 1800 li 1 were danîn; Wekî din, tezmînata paşverû ya berevajî ya ku ji hev veqetandî hatî destnîşan kirin dê neyê kirin. Tezmînata Gapê. G02, G03, JOG, û G01 hemî heman nirxa tezmînatê bikar tînin.

Tezmînata ji bo Pitch Errors
Positiona rast a amûrên makîneya CNC bi nirxandina rastbûna ku hêmanên guhezbar ên amûra makîneyê dikarin di bin fermana pergala CNC de bigihîjin vedihewîne. Ev rastbûn di cihêkirina amûrên makîneya CNC ji yên kevneşopî de rolek girîng dilîze. Bi rastbûna geometrîkî ya amûra makîneyê re, ew bi girîngî bandorê li rastbûna birînê dike, nemaze di makînekirina qulikê de. Çewtiya pitikê di sondajê de bandorek girîng heye. Kapasîteya amûrek makîneya CNC-ê ku rastbûna pêvajoyek wê binirxîne bi rastbûna pozîsyona gihîştî ve girêdayî ye. Ji ber vê yekê, tespîtkirin û rastkirina rastbûna pozîsyona amûrên makîneya CNC tedbîrên bingehîn in ku ji bo misogerkirina kalîteya pêvajoyê ne.
Pêvajoya Pîvana Pitch
Heya nuha, rêbaza bingehîn a ji bo nirxandin û birêkûpêkkirina amûrên makîneyê karanîna interferometreyên lazer ên du-frekansê ye. Van interferometre li ser prensîbên interferometrîya lazerê dixebitin û dirêjahiya pêla lazerê ya rast-dem wekî referansê ji bo pîvandinê bikar tînin, bi vî rengî rastbûna pîvandinê zêde dikin û qada sepanan berfireh dikin.
Pêvajoya tespîtkirina piyan wiha ye:
- Interferometreya lazerê ya du-frekansî saz bikin.
- Amûrek pîvandinê ya optîkî li tenişta amûra makîneyê ya ku pîvandinê hewce dike bi cih bikin.
- Serê lazerê hevûdu bikin da ku pê ewle bin ku eksê pîvandinê bi eksê tevgera amûra makîneyê re paralel an hevrêz e, bi vî rengî rêça optîkî pêşî li hev dike.
- Dema ku lazer bigihîje germahiya xebitandina xwe, pîvanên pîvandinê binivîsin.
- Bi veguheztina amûra makîneyê prosedurên pîvandinê yên diyarkirî pêk bînin.
- Daneyên pêvajoyê bikin û encaman çêbikin.
Tezmînata Çewtiya Pitch û Kalibrasyona Xweser
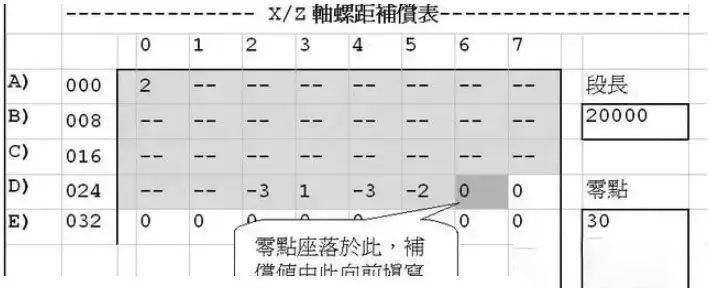
Gava ku xeletiya pîvandinê ya amûrek makîneya CNC ji rêza destûr derbas dibe, pêdivî ye ku xeletiyê rast bikin. Yek nêzîkatiya berbelav hesabkirina tabloya tezmînata xeletiya pitikan û bi desta têketina wê di pergala CNC ya amûra makîneyê de vedihewîne da ku xeletiya pozîsyonê rast bike. Lêbelê, tezmînata destan dikare dem-dixwe û berbi xeletiyan ve bibe, nemaze dema ku bi gelek xalên tezmînatê re li sê an çar axên amûra makîneya CNC mijûl dibe.
Ji bo rêkxistina vê pêvajoyê, çareseriyek hatiye pêşxistin. Bi girêdana komputer û kontrolkera CNC ya amûrê makîneyê bi navgîniya RS232 û bi karanîna nermalava kalibrasyonê ya otomatîkî ya ku di VB-ê de hatî çêkirin ve, gengaz e ku meriv interferometreya lazer û amûra makîneya CNC hevdeng bike. Vê hevdemkirinê vedîtina otomatîkî ya rastbûna pozîsyona amûra makîneya CNC û pêkanîna tazmînata xeletiya pitikê ya otomatîkî dihêle. Rêbaza tezmînatê dihewîne:
- Di pergala kontrolê ya CNC de hilanînê ji parametreyên tezmînatê yên heyî.
- Hilberîna bernameyek CNC ya amûra makîneyê ji bo pîvandina rastbûna pozîsyona xal-bi-xal bi karanîna komputerê, ku dûv re ji pergala CNC re tê şandin.
- Pîvandina bixweber xeletiya pozîsyona her xalê.
- Hilberîna komek nû ya parametreyên tezmînatê li ser bingeha xalên tezmînatê yên pêşwextkirî û şandina wan ji bo pergala CNC-ê ji bo tezmînata piçikê ya otomatîkî.
- Verastkirina rastbûna dubare.
Van çareseriyên taybetî armanc dikin ku rastbûna amûrên makîneya CNC zêde bikin. Lêbelê, pêdivî ye ku meriv bala xwe bide ku rastbûna amûrên makîneya CNC-ya cihêreng dibe ku cûda bibe. Wekî encamek, amûrên makîneyê divê li gorî rewşên wan ên kesane bêne pîvandin.
Ger tezmînata xeletiyê li ser amûra makîneyê neyê kirin, ew ê çi bandorek li ser perçeyên CNC-ê yên hilberandinî hebe?
Ger tezmînata xeletiyê li ser amûrek makîneyê were paşguh kirin, ew dikare di nav de nakokiyan çêbikeparçeyên CNCçêkirin. Mînakî, heke amûra makîneyê xeletiyek pozîsyona nerastkirî hebe, dibe ku pozîsyona rastîn a amûr an perçeya xebatê ji pozîsyona bernamekirî ya ku di bernameya CNC-ê de hatî destnîşan kirin veqete, û bibe sedema nerastiyên pîvan û xeletiyên geometrîkî yên di beşên hilberî de.
Mînakî, heke makîneyek pezkirina CNC di tebeqeya X-ê de xeletiyek pozîsyona nerastkirî hebe, dibe ku hêlîn an kunên di perçeyê xebatê de xelet werin rêz kirin an xwedan pîvanên nerast bin. Bi heman rengî, di operasyona laş de, xeletiyên cîhê nerastkirî dikare bibe sedema nerastiyê di dirêjahî an dirêjahiya parçeyên zivirî de. Van nakokiyan dibe ku bibe sedema perçeyên nelihev ên ku têk diçin
Anebon dê her xebata dijwar bike ku bibe hêja û hêja, û tedbîrên me ji bo rawestana ji rêza pargîdaniyên navparzemînî yên pola top û teknolojiyê bileztir bike ji bo Pêşkêşvanê Zêrîn a Chinaînê ji bo OEM, Xweser.karûbarê makînekirina cnc, Xizmeta çêkirinê ya Sheet Metal, karûbarên milling. Anebon dê kirîna weya kesane bike da ku bi têrkeriya we re hevdîtin pêk bîne! Karsaziya Anebon gelek beşan saz dike, di nav de beşa derketinê, beşa dahatê, beşa kontrolê ya hêja û navenda karûbarê, hwd.
Factory Supply ChinaBeşa Precision û Beşa Aluminium, Hûn dikarin Anebon bi ramana xwe bidin zanîn ku ji bo modela xwe sêwirana bêhempa pêşve bixin da ku pêşî li pir parçeyên wekhev di sûkê de bigirin! Em ê karûbarê xweya çêtirîn bidin ku hemî hewcedariyên we têr bikin! Ji bîr nekin ku di cih de bi Anebon re têkilî daynin!
Dema şandinê: Jan-09-2024